商机详情 -
南京提供机器人系统介绍
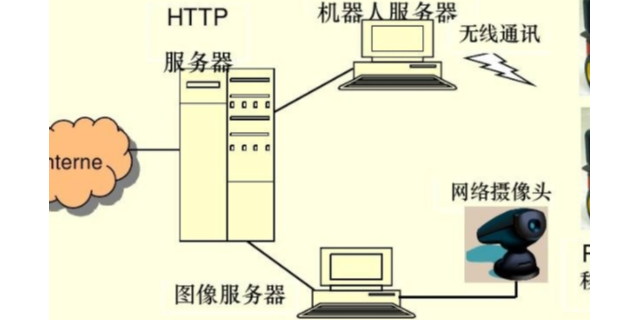
Stack manifests :提供关于Stack元数据,包括它的许可信息和Stack之间依赖关系。Message (msg) types: 信息描述, 位置在路径:my_package/msg/MyMessageT定义数据类型在ROS的 messages ROS里面。Service (srv) types: 服务描述,位置在路径:my_package/srv/MyServiceT定义这个请求和相应的数据结构 在ROS services 里面。Computation Graph Level(计算图)就是用ROS的P2P(peer-to-peer网络传输协议)网络集中处理所有的数据。基本的Computation Graph的概念包括Node, Master, Parameter Server,messages, services, topics, 和bags, 以上所有的这些都以不同的方式给Graph传输数据。伺服控制机器人又可分为点位伺服控制和连续路径(轨迹)伺服控制两种。南京提供机器人系统介绍
液压驱动系统运动平稳,且负载能力大,对于重载搬运和零件加工的机器人,采用液压驱动比较合理。但液压驱动存在管道复杂、清洁困难等缺点,因此限制了它在装配作业中的应用。无论电气还是液压驱动的机器人,其手爪的开合都采用气动形式。气压驱动机器人结构简单、动作迅速、价格低廉,但由于空气具有可压缩性,其工作速度的稳定性较差。但是,空气的可压缩性可使手爪在抓取或卡紧物体时的顺应性提高,防止受力过大而造成被抓物体或手爪本身的破坏。气压系统的压力一般为0.7 MPa,因而抓取力小,只有几十牛到几百牛大小。 [2溧水区如何机器人系统进口工业环境下,简单化与低成本是设计执行器的准则,因此,诸如开闭夹持器之类的简单设备应用非常普遍。
为了实现“共享与协作”这一首要目标,人们制订了ROS架构中的其他支援性目标:“轻便”:ROS是设计得尽可能方便简易。您不必替换主框架与系统,因为ROS编写的代码可以用于其他机器人软件框架中。毫无疑问的,ROS更易于集成与其他机器人软件框架。事实上ROS已完成与OpenRAVE、Orocos和Player的整合。ROS-agnostic库:【agnostic:不可知论】建议的开发模型是使用clear的函数接口书写ROS-agnostic库。语言性:ROS框架很容易在任何编程语言中执行。我们已经能在Python和C++中顺利运行,同时添加有Lisp、Octave和Java语言库。
机器人系统可以应用于工业制造中的自动化生产线,实现生产过程的自动化和智能化。机器人系统可以根据生产任务自主决策、自主学习和自主执行任务,提高生产效率和产品质量。医疗保健机器人系统可以应用于医疗保健中的手术机器人、康复机器人等,实现医疗过程的自动化和智能化。机器人系统可以根据患者的病情自主决策、自主学习和自主执行任务,提高医疗效果和患者体验。农业生产机器人系统可以应用于农业生产中的农业机器人、智能化温室等,实现农业生产过程的自动化和智能化。机器人系统可以根据作物的生长情况自主决策、自主学习和自主执行任务,提高农业生产效率和作物品质。液压驱动系统运动平稳,且负载能力大,对于重载搬运和零件加工的机器人,采用液压驱动比较合理。

机器人系统是由机器人和作业对象及环境共同构成的整体,其中包括机械系统、驱动系统、控制系统和感知系统四大部分。机器人是一种自动化的机器,这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器。至今还没有机器人的统一定义。要给机器人下一个合适的并为人们普遍接受的定义是困难的。们采用不同的方法来定义这个术语。它的定义还因公众对机器人的想象以及科学幻想小说、电影和电视中对机器人形状的描绘而变得更为困难。不具有智能,只具有一般编程能力和操作功能。栖霞区品牌机器人系统平台
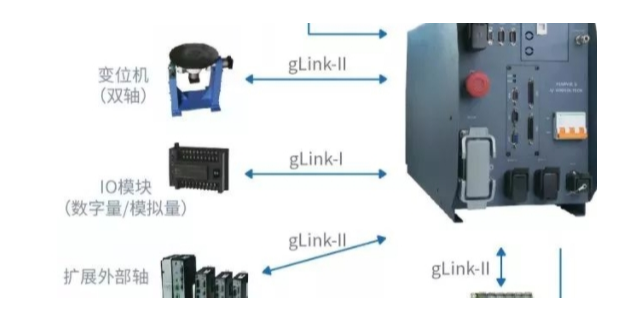
驱动系统主要是指驱动机械系统动作的驱动装置。南京提供机器人系统介绍
为了处理数据,我们也许会写一个使用laser_filters的node来订阅"扫描"topic的信息。订阅之后,我们的过滤器将会自动开始接收激光仪的信息。 注意两边是如何脱钩工作的。 所有的hokuyo_node的节点都会完成发布"扫描",不需要知道是否有节点被订阅了。所有的过滤器都会完成"扫描"的订阅,不论知道还是不知道是否有节点在发布"扫描"。 在不引发任何错误的情况下,这两个nodes可以任何的顺序启动,终止,或者重启。以后我们也许会给我们的机器人加入另外一个激光器,这会导致我们重新设置我们的系统。我们所需要做的就是重新映射已经使用过的names。当我们开始我们的个hokuyo_node时,我们可以说它用base_scan代替了映射扫描,并且和我们的过滤器节点做相同的事。这些节点将会用base_scan的topic来通信从而代替,并且将不再"扫描"topic的信息。然后我们就可以为我们的新激光测距仪启动另外一个hokuyo_node。南京提供机器人系统介绍
南京晟睿达机械有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在江苏省等地区的商务服务中汇聚了大量的人脉以及**,在业界也收获了很多良好的评价,这些都源自于自身的努力和大家共同进步的结果,这些评价对我们而言是比较好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同南京晟睿达机械供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!