商机详情 -
栖霞区提供机器人系统平台
(2)交互界面设计:交互界面是机器人与人类进行交互的界面,包括屏幕、语音输出、机器人动作等。交互界面需要考虑人类的视觉、听觉、触觉等感官因素。(3)交互内容设计:交互内容是机器人与人类进行交互的内容,包括任务指令、娱乐等。交互内容需要考虑人类的需求、兴趣、心理等因素。二、机器人系统的实现机器人系统的实现需要考虑以下几个方面:硬件实现机器人系统的硬件实现包括机器人的机械结构、传感器、执行器、控制器等。硬件实现需要考虑机器人的功能需求、工作环境、成本等因素。机器人的机械结构需要考虑机器人的运动范围、载荷能力、稳定性等因素。机器人的传感器需要考虑机器人的感知范围、精度、响应速度等因素。机器人的执行器需要考虑机器人的动作范围、精度、速度等因素。机器人的控制器需要考虑机器人的控制算法、通信协议、实时性等因素。伺服控制机器人比非伺服机器人有更强的工作能力,因而价格较贵,而且在某些情况下不如简单的机器人可靠。栖霞区提供机器人系统平台
2)伺服控制机器人。伺服控制机器人比非伺服机器人有更强的工作能力,因而价格较贵,而且在某些情况下不如简单的机器人可靠。伺服控制机器人又可分为点位伺服控制和连续路径(轨迹)伺服控制两种。(3)按机器人控制器的信息输人方式分类在采用这种分类法进行分类时,对于不同国家也略有不同,但它们能够有统一的标准。这里主要介绍日本工业机器人协会(JIRA)、美国机器人协会(RIA)和法国工业机器人协会(AFRI)所采用的分类法。1)JIRA分类法。日本工业机器人协会将机器人分为六类:手动操作手、定序机器人、变序机器人、复演式机器人、程控机器人和智能机器人。其中,智能机器人能够采用传感信息来检测其工作环境或工作条件的变化,并借助其自我决策能力,成功地进行相应的工作,而不管其执行任务的环境条件发生了什么变化。鼓楼区怎样机器人系统选择或简称为空军机器人、海军机器人和陆军机器人。
(1)按机械手的几何结构分类机器人机械手的机械配置形式多种多样。常见的结构形式是用其坐标特性来描述的。这些坐标结构包括笛卡儿坐标结构、柱面坐标结构、极坐标结构、球面坐标结构和关节式球面坐标结构等。这里简单介绍柱面、球面和关节式球面坐标结构三种常见的机器人。(2)按机器人的控制方式分类按照控制方式可将机器人分为非伺服机器人和伺服控制机器人两种。1)非伺服机器人。非伺服机器人工作能力比较有限,它们往往涉及那些叫做“终点”、“抓放”或“开关”式机器人,尤其是“有限顺序”机器人。
2)RIA分类法。美国机器人协会将JIRA分类法中的后四种机器当做机器人。(4)按机器人的智能程度分类1)一般机器人。不具有智能,只具有一般编程能力和操作功能。2)智能机器人。具有不同程度的智能,又可分为:a.传感型机器人。具有利用传感信息(包括视觉、听觉、触觉、接近觉、力觉和红外、超声及激光等)进行传感信息处理,实现控制与操作。b.交互型机器人。机器人通过计算机系统与操作员或程序员进行人机对话,实现对机器人的控制与操作。驱动系统主要是指驱动机械系统动作的驱动装置。

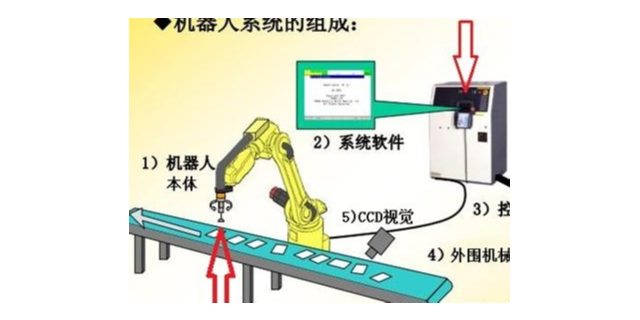
人-机器人系统亦称“有人参与的机器人”。由人和机器人共同组成的多效能人机系统。通常意义上的机器人是指那种按人类预先编制的工作程序完成某种具有智能性作业的机器系统,如工业装配机器人、博弈机等。运作方式通常是将机器人传感器获得的外界信息直接地或先进行某些计算加工后通过某种通道传递给人操作者,然后由人操作者作下一步如何作业的决策,人的决策又通过控制器或指定的传输通道传递给机器人,再由机器人的执行器实时地执行人操作者的操作意图。软件主要由人与机器人进行联系的人机交互系统和控制算法等组成。栖霞区管理机器人系统包括
空气的可压缩性可使手爪在抓取或卡紧物体时的顺应性提高,防止受力过大而造成被抓物体或手爪本身的破坏。栖霞区提供机器人系统平台
为了处理数据,我们也许会写一个使用laser_filters的node来订阅"扫描"topic的信息。订阅之后,我们的过滤器将会自动开始接收激光仪的信息。 注意两边是如何脱钩工作的。 所有的hokuyo_node的节点都会完成发布"扫描",不需要知道是否有节点被订阅了。所有的过滤器都会完成"扫描"的订阅,不论知道还是不知道是否有节点在发布"扫描"。 在不引发任何错误的情况下,这两个nodes可以任何的顺序启动,终止,或者重启。以后我们也许会给我们的机器人加入另外一个激光器,这会导致我们重新设置我们的系统。我们所需要做的就是重新映射已经使用过的names。当我们开始我们的个hokuyo_node时,我们可以说它用base_scan代替了映射扫描,并且和我们的过滤器节点做相同的事。这些节点将会用base_scan的topic来通信从而代替,并且将不再"扫描"topic的信息。然后我们就可以为我们的新激光测距仪启动另外一个hokuyo_node。栖霞区提供机器人系统平台
南京晟睿达机械有限公司在同行业领域中,一直处在一个不断锐意进取,不断制造创新的市场高度,多年以来致力于发展富有创新价值理念的产品标准,在江苏省等地区的商务服务中始终保持良好的商业口碑,成绩让我们喜悦,但不会让我们止步,残酷的市场磨炼了我们坚强不屈的意志,和谐温馨的工作环境,富有营养的公司土壤滋养着我们不断开拓创新,勇于进取的无限潜力,南京晟睿达机械供应携手大家一起走向共同辉煌的未来,回首过去,我们不会因为取得了一点点成绩而沾沾自喜,相反的是面对竞争越来越激烈的市场氛围,我们更要明确自己的不足,做好迎接新挑战的准备,要不畏困难,激流勇进,以一个更崭新的精神面貌迎接大家,共同走向辉煌回来!