标签列表 - 南京晟睿达机械有限公司
-
 栖霞区提供机器人系统平台
栖霞区提供机器人系统平台(2)交互界面设计:交互界面是机器人与人类进行交互的界面,包括屏幕、语音输出、机器人动作等。交互界面需要考虑人类的视觉、听觉、触觉等感官因素。(3)交互内容设计:交互内容是机器人与人类进行交互的内容,包括任务指令、娱乐等。交互内容需要考虑人类的需求、兴趣、心理等因素。二、机器人系统的实现机器人系统的实现需要考虑以下几个方面:硬件实现机器人系统的硬件实现包括机器人的机械结构、传感器、执行器、控制器等。硬件实现需要考虑机器人的功能需求、工作环境、成本等因素。机器人的机械结构需要考虑机器人的运动范围、载荷能力、稳定性等因素。机器人的传感器需要考虑机器人的感知范围、精度、响应速度等因素。机器人的执行器...
发布时间:2024.01.17 -
 雨花台区怎样机器人系统大概是
雨花台区怎样机器人系统大概是2)服务机器人:主要用于为人类提供服务,如家庭清洁机器人、医疗机器人等。(3)机器人:主要用于领域,如侦察机器人、无人机等。(4)教育机器人:主要用于教育领域,如编程教育机器人、语言教育机器人等。2.按照结构分类根据机器人的结构,可以将其分为以下几类:(1)固定式机器人:机器人的结构固定,不能移动。(2)移动式机器人:机器人的结构可以移动,可以在不同的地方执行任务。(3)仿生机器人:机器人的结构和功能类似于生物体,如机器人手臂、机器人腿等。机器人机械手的机械配置形式多种多样。雨花台区怎样机器人系统大概是机器人系统是一种基于人工智能技术的智能化系统,它可以模拟人类的思维和行为,实现自主决策、自主...
-
栖霞区综合机器人系统优势
这样的架构允许解耦操作(decoupled operation),通过这种方式大型或是更为复杂的系统得以建立,其中names方式是一种行之有效的手段。names方式在ROS系统中扮演极为重要的角色: topics, services, and parameters 都有各自的names。每一个ROS客户端库都支持重命名,这等同于,每一个编译成功的程序能够以另一种形似【名字】运行。例如,为了控制一个北阳激光测距仪(Hokuyo laser range-finder),我们可以启动这个hokuyo_node 驱动,这个驱动可以给与激光仪进行对话并且在"扫描"topic下可以发布sensor_msg...
-
 鼓楼区一站式机器人系统好处
鼓楼区一站式机器人系统好处4)机器人。用于目的,或进攻性的,或防御性的。它又可分为空中机器人、海洋机器人和地面机器人。或简称为空军机器人、海军机器人和陆军机器人。(6)按机器人移动性分类1)固定式机器人。固定在某个底座上,整台机器人(或机械手)不能移动,只能移动各个关节。2)移动机器人。整个机器人可沿某个方向或任意方向移动。这种机器人又可分为轮式机器人、履带式机器人和步行机器人,其中后者又有单足、双足、四足、六足和八足行走机器人之分。无论电气还是液压驱动的机器人,其手爪的开合都采用气动形式。鼓楼区一站式机器人系统好处总之,机器人系统是一种具有应用前景的技术,随着人工智能、物联网等技术的发展,机器人系统将会越来越普及和成...
-
溧水区本地机器人系统介绍
驱动系统驱动系统主要是指驱动机械系统动作的驱动装置。根据驱动源的不同,驱动系统可分为电气、液压和气压三种以及把它们结合起来应用的综合系统。该部分的作用相当于人的肌肉。电气驱动系统在工业机器人中应用得较普遍,可分为步进电动机、直流伺服电动机和交流伺服电动机三种驱动形式。早期多采用步进电动机驱动,后来发展了直流伺服电动机,交流伺服电动机驱动也逐渐得到应用。上述驱动单元有的用于直接驱动机构运动:有的通过谐波减速器减速后驱动机构运动,其结构简单紧凑。工业机器人机械系统的作用相当于人的身体(如骨髓、手、臂和腿等)。溧水区本地机器人系统介绍机器人系统的主要特点是具有自主性、智能性和灵活性。自主性指机器人系...
-
 鼓楼区综合机器人系统大概是
鼓楼区综合机器人系统大概是机器人系统是指由多个机器人组成的系统,这些机器人可以协同工作,完成各种任务。机器人系统通常由硬件和软件两部分组成,硬件包括机器人本身和相关的传感器、执行器等设备,软件则包括控制算法、路径规划、任务分配等程序。机器人系统的应用范围非常,包括工业制造、医疗保健、防卫、环境监测、教育培训等领域。在工业制造中,机器人系统可以完成各种重复性、高精度的工作,提高生产效率和产品质量。在医疗保健中,机器人系统可以协助医生进行手术、康复训练等工作,提高医疗水平和效果。在防卫中,机器人系统可以执行侦察、排雷、拆弹等任务,保障士兵的安全。在环境监测中,机器人系统可以进行水质、空气等方面的监测,提高环境保护水平。在教...
-
六合区提供机器人系统选择
Nodes: Nodes(节点)是一系列运行中的程序。ROS被设计成在一定颗粒度下的模块化系统。一个机器人控制系统通常包含许多Nodes。比如一个Node控制激光雷达,一个Node控制车轮马达,一个Node处理定位,一个Node执行路径规划,另外一个提供图形化界面等等。一个ROS节点是由Libraries ROS client library写成的, 例如 roscpp和rospy。Master: ROS Master 提供了登记列表和对其他计算图的查找。没有Master,节点将无法找到其他节点,交换消息或调用服务。Server Parameter Server: 参数服务器使数据按照钥匙的方...
-
南京提供机器人系统进口
液压驱动系统运动平稳,且负载能力大,对于重载搬运和零件加工的机器人,采用液压驱动比较合理。但液压驱动存在管道复杂、清洁困难等缺点,因此限制了它在装配作业中的应用。无论电气还是液压驱动的机器人,其手爪的开合都采用气动形式。气压驱动机器人结构简单、动作迅速、价格低廉,但由于空气具有可压缩性,其工作速度的稳定性较差。但是,空气的可压缩性可使手爪在抓取或卡紧物体时的顺应性提高,防止受力过大而造成被抓物体或手爪本身的破坏。气压系统的压力一般为0.7 MPa,因而抓取力小,只有几十牛到几百牛大小。 [2它又可分为空中机器人、海洋机器人和地面机器人。南京提供机器人系统进口工业环境下,简单化与低成本是设计执行...
-
鼓楼区怎样机器人系统好处
为了处理数据,我们也许会写一个使用laser_filters的node来订阅"扫描"topic的信息。订阅之后,我们的过滤器将会自动开始接收激光仪的信息。 注意两边是如何脱钩工作的。 所有的hokuyo_node的节点都会完成发布"扫描",不需要知道是否有节点被订阅了。所有的过滤器都会完成"扫描"的订阅,不论知道还是不知道是否有节点在发布"扫描"。 在不引发任何错误的情况下,这两个nodes可以任何的顺序启动,终止,或者重启。以后我们也许会给我们的机器人加入另外一个激光器,这会导致我们重新设置我们的系统。我们所需要做的就是重新映射已经使用过的names。当我们开始我们的个hokuyo_node...
-
高淳区综合机器人系统好处
Filesystem Level文件系统层概念就是你在碟片里面遇到的资源,例如:Packages:ROS的基本组织,可以包含任意格式文件。一个Package 可以包含ROS执行时处理的文件(nodes),一个ROS的依赖库,一个数据,配置文件或一些有用的文件在一起。Manifests:Manifests (manifest.xml) 提供关于Package元数据,包括它的许可信息和Package之间依赖关系,以及语言特性信息像编译旗帜(编译优化参数)。Stacks: Stacks 是Packages的,它提供一个完整的功能,像“navigation stack” Stack与版本号关联,同时也...
-
 建邺区管理机器人系统包括
建邺区管理机器人系统包括为了实现“共享与协作”这一首要目标,人们制订了ROS架构中的其他支援性目标:“轻便”:ROS是设计得尽可能方便简易。您不必替换主框架与系统,因为ROS编写的代码可以用于其他机器人软件框架中。毫无疑问的,ROS更易于集成与其他机器人软件框架。事实上ROS已完成与OpenRAVE、Orocos和Player的整合。ROS-agnostic库:【agnostic:不可知论】建议的开发模型是使用clear的函数接口书写ROS-agnostic库。语言性:ROS框架很容易在任何编程语言中执行。我们已经能在Python和C++中顺利运行,同时添加有Lisp、Octave和Java语言库。这里简单介绍柱面、...
-
浦口区参考机器人系统包括
液压驱动系统运动平稳,且负载能力大,对于重载搬运和零件加工的机器人,采用液压驱动比较合理。但液压驱动存在管道复杂、清洁困难等缺点,因此限制了它在装配作业中的应用。无论电气还是液压驱动的机器人,其手爪的开合都采用气动形式。气压驱动机器人结构简单、动作迅速、价格低廉,但由于空气具有可压缩性,其工作速度的稳定性较差。但是,空气的可压缩性可使手爪在抓取或卡紧物体时的顺应性提高,防止受力过大而造成被抓物体或手爪本身的破坏。气压系统的压力一般为0.7 MPa,因而抓取力小,只有几十牛到几百牛大小。 [2或简称为空军机器人、海军机器人和陆军机器人。浦口区参考机器人系统包括驱动系统驱动系统主要是指驱动机械系统...
-
秦淮区本地机器人系统平台
本发明提供一种即便减小用于使第1机器人不干扰的空间也能够实现使第1机器人的末端部的位置向绕第1转动轴分离180°的位置移动的动作的具有机器人的机器人系统。机器人系统(100)具备:单元室(5);和设置于单元室(5)的第1机器人(1a)以及第2机器人(1b),第1机器人(1a)具有:第n臂,其能够绕第n(n为1以上的整数)转动轴转动;和第(n+1)臂,其在第n臂设置为能够绕轴向与第n转动轴的轴向不同的第(n+1)转动轴转动,第n臂的长度比所述第(n+1)臂的长度长,从第(n+1)转动轴观察,所述第n臂与所述第(n+1)臂能够重叠。或简称为空军机器人、海军机器人和陆军机器人。秦淮区本地机器人系统平...
-
南京参考机器人系统介绍
(1)按机械手的几何结构分类机器人机械手的机械配置形式多种多样。常见的结构形式是用其坐标特性来描述的。这些坐标结构包括笛卡儿坐标结构、柱面坐标结构、极坐标结构、球面坐标结构和关节式球面坐标结构等。这里简单介绍柱面、球面和关节式球面坐标结构三种常见的机器人。(2)按机器人的控制方式分类按照控制方式可将机器人分为非伺服机器人和伺服控制机器人两种。1)非伺服机器人。非伺服机器人工作能力比较有限,它们往往涉及那些叫做“终点”、“抓放”或“开关”式机器人,尤其是“有限顺序”机器人。上述驱动单元有的用于直接驱动机构运动:有的通过谐波减速器减速后驱动机构运动,其结构简单紧凑。南京参考机器人系统介绍软件实现机...
-
高淳区品牌机器人系统进口
为了处理数据,我们也许会写一个使用laser_filters的node来订阅"扫描"topic的信息。订阅之后,我们的过滤器将会自动开始接收激光仪的信息。 注意两边是如何脱钩工作的。 所有的hokuyo_node的节点都会完成发布"扫描",不需要知道是否有节点被订阅了。所有的过滤器都会完成"扫描"的订阅,不论知道还是不知道是否有节点在发布"扫描"。 在不引发任何错误的情况下,这两个nodes可以任何的顺序启动,终止,或者重启。以后我们也许会给我们的机器人加入另外一个激光器,这会导致我们重新设置我们的系统。我们所需要做的就是重新映射已经使用过的names。当我们开始我们的个hokuyo_node...
-
栖霞区品牌机器人系统便捷
驱动系统驱动系统主要是指驱动机械系统动作的驱动装置。根据驱动源的不同,驱动系统可分为电气、液压和气压三种以及把它们结合起来应用的综合系统。该部分的作用相当于人的肌肉。电气驱动系统在工业机器人中应用得较普遍,可分为步进电动机、直流伺服电动机和交流伺服电动机三种驱动形式。早期多采用步进电动机驱动,后来发展了直流伺服电动机,交流伺服电动机驱动也逐渐得到应用。上述驱动单元有的用于直接驱动机构运动:有的通过谐波减速器减速后驱动机构运动,其结构简单紧凑。或简称为空军机器人、海军机器人和陆军机器人。栖霞区品牌机器人系统便捷二、机器人系统的应用领域制造业机器人系统在制造业中的应用非常,可以用于生产线上的各种任...
-
江宁区综合机器人系统便捷
机器人系统的主要特点是具有自主性、智能性和灵活性。自主性指机器人系统可以完成任务,不需要人类的干预;智能性指机器人系统具有学习、推理、决策等能力;灵活性指机器人系统可以适应不同的环境和任务,具有较强的适应性。机器人系统的分类机器人系统可以按照不同的分类标准进行分类,常见的分类标准包括机器人的结构、任务、控制方式等。按照机器人的结构,机器人系统可以分为以下几类:(1)固定式机器人:固定式机器人是指机器人系统的机械结构固定在一个位置,只能在一个固定的区域内进行操作。根据驱动源的不同,驱动系统可分为电气、液压和气压三种以及把它们结合起来应用的综合系统。江宁区综合机器人系统便捷(1)手动控制:手动控制...
-
雨花台区如何机器人系统平台
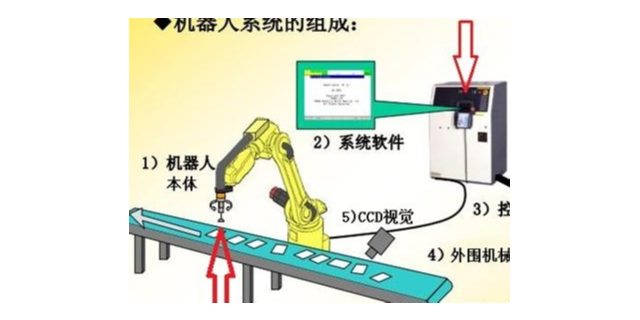
机器人系统实际上是一个典型的机电一体化系统,其工作原理为:控制系统发出动作指令,控制驱动器动作,驱动器带动机械系统运动,使末端操作器到达空间某一位置和实现某一姿态,实施一定的作业任务。末端操作器在空间的实际位姿由感知系统反馈给控制系统,控制系统把实际位姿与目标位姿相比较,发出下一个动作指令,如此循环,直到完成作业任务为止机器人的分类方法很多。这里首先介绍i种分类法,即按机械手的几何结构、机器人的控制方式以及机器人的信息输入方式。它又可分为空中机器人、海洋机器人和地面机器人。雨花台区如何机器人系统平台为了规定技术、开发机器人新的工作能力和比较不同国家和公司的成果,就需要对机器人这一术语有某些共同...
-
玄武区品牌机器人系统便捷
(1)手动控制:手动控制是指机器人系统需要人类进行手动控制,才能完成任务。手动控制通常通过遥控器、操纵杆等设备进行。(2)自动控制:自动控制是指机器人系统可以自主完成任务,不需要人类进行手动控制。自动控制通常通过程序控制实现。(3)半自动控制:半自动控制是指机器人系统需要人类进行部分手动控制,才能完成任务。半自动控制通常通过手动控制和自动控制相结合实现。机器人系统的感知机器人系统的感知是指机器人系统通过感知系统获取周围环境的信息,从而更好地完成任务。机器人系统的感知通常包括视觉、听觉、触觉等。机器人机械手的机械配置形式多种多样。玄武区品牌机器人系统便捷2)RIA分类法。美国机器人协会将JIRA...
-
栖霞区提供机器人系统优势
(3)执行算法设计:执行算法是机器人执行任务的关键,包括动作控制、运动规划、力控制等。执行算法需要考虑机器人的机械结构、执行器类型、执行器精度等因素。人机交互设计机器人系统的人机交互设计是机器人与人类进行交互的关键,包括语音交互、图形界面、手势识别等。人机交互设计需要考虑以下几个方面:(1)交互方式设计:交互方式是机器人与人类进行交互的方式,包括语音、图形、手势等。交互方式需要考虑人类的习惯、语言、文化等因素。液压驱动系统运动平稳,且负载能力大,对于重载搬运和零件加工的机器人,采用液压驱动比较合理。栖霞区提供机器人系统优势(1)按机械手的几何结构分类机器人机械手的机械配置形式多种多样。常见的结...
-
江苏本地机器人系统包括
基于服务的同步RPC(远程过程调用)通讯;2.基于Topic的异步数据流通讯,还有参数服务器上的数据存储。发展目标ROS的首要设计目标是在机器人研发领域提高代码复用率。ROS是一种分布式处理框架(又名Nodes)。这使可执行文件能被单独设计,并且在运行时松散耦合。这些过程可以封装到数据包(Packages)和堆栈(Stacks)中,以便于共享和分发。ROS还支持代码库的联合系统。使得协作亦能被分发。这种从文件系统级别到社区一级的设计让地决定发展和实施工作成为可能。上述所有功能都能由ROS的基础工具实现。早期多采用步进电动机驱动,后来发展了直流伺服电动机,交流伺服电动机驱动也逐渐得到应用。江苏本...
-
江苏一站式机器人系统介绍
(1)按机械手的几何结构分类机器人机械手的机械配置形式多种多样。常见的结构形式是用其坐标特性来描述的。这些坐标结构包括笛卡儿坐标结构、柱面坐标结构、极坐标结构、球面坐标结构和关节式球面坐标结构等。这里简单介绍柱面、球面和关节式球面坐标结构三种常见的机器人。(2)按机器人的控制方式分类按照控制方式可将机器人分为非伺服机器人和伺服控制机器人两种。1)非伺服机器人。非伺服机器人工作能力比较有限,它们往往涉及那些叫做“终点”、“抓放”或“开关”式机器人,尤其是“有限顺序”机器人。上述驱动单元有的用于直接驱动机构运动:有的通过谐波减速器减速后驱动机构运动,其结构简单紧凑。江苏一站式机器人系统介绍人-机器...
-
建邺区怎样机器人系统平台
人-机器人系统亦称“有人参与的机器人”。由人和机器人共同组成的多效能人机系统。通常意义上的机器人是指那种按人类预先编制的工作程序完成某种具有智能性作业的机器系统,如工业装配机器人、博弈机等。运作方式通常是将机器人传感器获得的外界信息直接地或先进行某些计算加工后通过某种通道传递给人操作者,然后由人操作者作下一步如何作业的决策,人的决策又通过控制器或指定的传输通道传递给机器人,再由机器人的执行器实时地执行人操作者的操作意图。气压驱动机器人结构简单、动作迅速、价格低廉,但由于空气具有可压缩性,其工作速度的稳定性较差。建邺区怎样机器人系统平台服务业机器人系统在服务业中的应用也越来越普及,可以用于酒店、...
-
雨花台区管理机器人系统优势
(2)服务机器人:服务机器人是指用于服务领域的机器人系统,可以完成清洁、保安、导航等服务任务。(3)医疗机器人:医疗机器人是指用于医疗领域的机器人系统,可以完成手术、诊断、康复等医疗任务。(4)农业机器人:农业机器人是指用于农业生产中的机器人系统,可以完成种植、收割、除草等农业生产任务。按照机器人的控制方式,机器人系统可以分为以下几类:(1)手动控制机器人:手动控制机器人是指机器人系统需要人类进行手动控制,才能完成任务。(2)自动控制机器人:自动控制机器人是指机器人系统可以自主完成任务,不需要人类进行手动控制。伺服控制机器人比非伺服机器人有更强的工作能力,因而价格较贵,而且在某些情况下不如简单...
-
高淳区本地机器人系统热线
Stack manifests :提供关于Stack元数据,包括它的许可信息和Stack之间依赖关系。Message (msg) types: 信息描述, 位置在路径:my_package/msg/MyMessageType.msg, 定义数据类型在ROS的 messages ROS里面。Service (srv) types: 服务描述,位置在路径:my_package/srv/MyServiceType.srv, 定义这个请求和相应的数据结构 在ROS services 里面。Computation Graph Level(计算图)就是用ROS的P2P(peer-to-peer网络传输协议...
-
鼓楼区提供机器人系统便捷
在ROS的计算图中,ROS的Master以一个name service的方式工作。它给ROS的节点存储了topics和service的注册信息。Nodes 与Master通信从而报告它们的注册信息。当这些节点与master通信的时候,它们可以接收关于其他以注册节点的信息并且建立与其它以注册节点之间的联系。当这些注册信息改变时Master也会回馈这些节点,同时允许节点动态创建与新节点之间的连接。节点之间的连接是直接的; Master提供了查询信息,就像一个DNS服务器。节点订阅一个topic将会要求建立一个与发布该topics的节点的连接,并且将会在同意连接协议的基础上建立该连接。ROS里面使用...
-
栖霞区提供机器人系统好处
本发明提供一种即便减小用于使第1机器人不干扰的空间也能够实现使第1机器人的末端部的位置向绕第1转动轴分离180°的位置移动的动作的具有机器人的机器人系统。机器人系统(100)具备:单元室(5);和设置于单元室(5)的第1机器人(1a)以及第2机器人(1b),第1机器人(1a)具有:第n臂,其能够绕第n(n为1以上的整数)转动轴转动;和第(n+1)臂,其在第n臂设置为能够绕轴向与第n转动轴的轴向不同的第(n+1)转动轴转动,第n臂的长度比所述第(n+1)臂的长度长,从第(n+1)转动轴观察,所述第n臂与所述第(n+1)臂能够重叠。如果机器人不具备信息反馈特征,则该控制系统称为开环控制系统;栖霞区...
-
鼓楼区如何机器人系统选择
ROS(机器人操作系统,Robot Operating System),是专为机器人软件开发所设计出来的一套电脑操作系统架构。它是一个开源的元级操作系统(后操作系统),提供类似于操作系统的服务,包括硬件抽象描述、底层驱动程序管理、共用功能的执行、程序间消息传递、程序发行包管理,它也提供一些工具和库用于获取、建立、编写和执行多机融合的程序。ROS的运行架构是一种使用ROS通信模块实现模块间P2P的松耦合的网络连接的处理架构,它执行若干种类型的通讯,包括:至今还没有机器人的统一定义。要给机器人下一个合适的并为人们普遍接受的定义是困难的。鼓楼区如何机器人系统选择Services:发布/订阅模型是很灵...
-
溧水区品牌机器人系统选择
(2)移动式机器人:移动式机器人是指机器人系统的机械结构可以在不同的位置进行移动,可以在不同的区域内进行操作。(3)人形机器人:人形机器人是指机器人系统的机械结构模仿人类的外形和动作,可以在人类的环境中进行操作。(4)车辆机器人:车辆机器人是指机器人系统的机械结构模仿车辆的外形和动作,可以在地面、水面、空中等不同的环境中进行操作。按照机器人的任务,机器人系统可以分为以下几类:(1)工业机器人:工业机器人是指用于工业生产中的机器人系统,可以完成装配、焊接、喷涂等工业生产任务。伺服控制机器人又可分为点位伺服控制和连续路径(轨迹)伺服控制两种。溧水区品牌机器人系统选择(2)服务机器人:服务机器人是指...
-
溧水区参考机器人系统便捷
软件实现机器人系统的软件实现包括机器人的控制算法、人机交互界面、通信协议等。软件实现需要考虑机器人的任务需求、性能要求、可扩展性等因素。机器人的控制算法需要考虑机器人的感知能力、决策能力、执行能力等因素。机器人的人机交互界面需要考虑机器人的交互方式、交互界面、交互内容等因素。机器人的通信协议需要考虑机器人与其他设备的通信方式、通信协议、数据传输速度等因素。三、机器人系统的应用机器人系统的应用非常,可以应用于工业制造、医疗保健、农业生产、家庭服务等领域。以下是机器人系统的几个应用案例:工业制造此时,一系列致力于研发高度拟人化机器人的工程已经相继启动。溧水区参考机器人系统便捷机器人系统是一种能够自...