标签列表 - 南京晟睿达机械有限公司
-
 江宁区如何机器人系统好处
江宁区如何机器人系统好处Nodes: Nodes(节点)是一系列运行中的程序。ROS被设计成在一定颗粒度下的模块化系统。一个机器人控制系统通常包含许多Nodes。比如一个Node控制激光雷达,一个Node控制车轮马达,一个Node处理定位,一个Node执行路径规划,另外一个提供图形化界面等等。一个ROS节点是由Libraries ROS client library写成的, 例如 roscpp和rospy。Master: ROS Master 提供了登记列表和对其他计算图的查找。没有Master,节点将无法找到其他节点,交换消息或调用服务。Server Parameter Server: 参数服务器使数据按照钥匙的方...
发布时间:2024.05.29 -
 六合区怎样机器人系统优势
六合区怎样机器人系统优势(2)移动式机器人:移动式机器人是指机器人系统的机械结构可以在不同的位置进行移动,可以在不同的区域内进行操作。(3)人形机器人:人形机器人是指机器人系统的机械结构模仿人类的外形和动作,可以在人类的环境中进行操作。(4)车辆机器人:车辆机器人是指机器人系统的机械结构模仿车辆的外形和动作,可以在地面、水面、空中等不同的环境中进行操作。按照机器人的任务,机器人系统可以分为以下几类:(1)工业机器人:工业机器人是指用于工业生产中的机器人系统,可以完成装配、焊接、喷涂等工业生产任务。机器人通过计算机系统与操作员或程序员进行人机对话,实现对机器人的控制与操作。六合区怎样机器人系统优势机器人是一种能够自主执...
-
 栖霞区提供机器人系统大概是
栖霞区提供机器人系统大概是软件实现机器人系统的软件实现包括机器人的控制算法、人机交互界面、通信协议等。软件实现需要考虑机器人的任务需求、性能要求、可扩展性等因素。机器人的控制算法需要考虑机器人的感知能力、决策能力、执行能力等因素。机器人的人机交互界面需要考虑机器人的交互方式、交互界面、交互内容等因素。机器人的通信协议需要考虑机器人与其他设备的通信方式、通信协议、数据传输速度等因素。三、机器人系统的应用机器人系统的应用非常,可以应用于工业制造、医疗保健、农业生产、家庭服务等领域。以下是机器人系统的几个应用案例:工业制造该部分的作用相当于人的五官。栖霞区提供机器人系统大概是一、机器人系统的设计机器人系统的设计需要考虑以下几...
-
高淳区如何机器人系统包括
这样的架构允许解耦操作(decoupled operation),通过这种方式大型或是更为复杂的系统得以建立,其中names方式是一种行之有效的手段。names方式在ROS系统中扮演极为重要的角色: topics, services, and parameters 都有各自的names。每一个ROS客户端库都支持重命名,这等同于,每一个编译成功的程序能够以另一种形似【名字】运行。例如,为了控制一个北阳激光测距仪(Hokuyo laser range-finder),我们可以启动这个hokuyo_node 驱动,这个驱动可以给与激光仪进行对话并且在"扫描"topic下可以发布sensor_msg...
-
 建邺区提供机器人系统介绍
建邺区提供机器人系统介绍控制算法设计机器人系统的控制算法是实现机器人自主决策、自主学习和自主执行任务的关键。控制算法设计需要考虑以下几个方面:(1)感知算法设计:感知算法是机器人获取环境信息的关键,包括视觉、声音、触觉等。感知算法需要考虑机器人的传感器类型、传感器精度、传感器数据处理等因素。(2)决策算法设计:决策算法是机器人根据环境信息做出决策的关键,包括路径规划、动作选择、任务分配等。决策算法需要考虑机器人的任务需求、环境变化、决策效率等因素。移动机器人。整个机器人可沿某个方向或任意方向移动。建邺区提供机器人系统介绍(3)半自动控制机器人:半自动控制机器人是指机器人系统需要人类进行部分手动控制,才能完成任务。机器...
-
 南京品牌机器人系统大概是
南京品牌机器人系统大概是工业环境下,简单化与低成本是设计执行器的准则,因此,诸如开闭夹持器之类的简单设备应用非常普遍。这种情况使得多年来一些设备已经发展为只能执行单一的特定操作而不适用于其他任务。此时,灵巧型多指机器人手由于其可靠性、复杂性和成本等问题尚未被应用与任何主要的生产领域。另一方面,如今越来越多的操作被设计成由人类操控的机器人在特定的工作环境下工作,娱乐、维修、空间探测、帮助残疾人都是机器人系统应用的典型例子,这些例子中,机器人需要操作为人设计的工具或物体(或者人类自身)。这种情况下,机器人必须能抓取并熟练操作尺寸、形状、质量等不同的物体,因此,具有合适数目手指及高度拟人化外表的机器人手是的选择。其中包括机...
-
秦淮区一站式机器人系统便捷
2)伺服控制机器人。伺服控制机器人比非伺服机器人有更强的工作能力,因而价格较贵,而且在某些情况下不如简单的机器人可靠。伺服控制机器人又可分为点位伺服控制和连续路径(轨迹)伺服控制两种。(3)按机器人控制器的信息输人方式分类在采用这种分类法进行分类时,对于不同国家也略有不同,但它们能够有统一的标准。这里主要介绍日本工业机器人协会(JIRA)、美国机器人协会(RIA)和法国工业机器人协会(AFRI)所采用的分类法。1)JIRA分类法。日本工业机器人协会将机器人分为六类:手动操作手、定序机器人、变序机器人、复演式机器人、程控机器人和智能机器人。其中,智能机器人能够采用传感信息来检测其工作环境或工作条...
-
玄武区怎样机器人系统热线
一、机器人系统的设计机器人系统的设计需要考虑以下几个方面:系统架构设计机器人系统的架构设计是整个系统的基础,它决定了系统的性能、可靠性和可扩展性。机器人系统的架构设计应该包括以下几个方面:(1)硬件架构设计:硬件架构设计是机器人系统的物理结构,包括机器人的机械结构、传感器、执行器、控制器等。硬件架构设计需要考虑机器人的功能需求、工作环境、成本等因素。2)软件架构设计:软件架构设计是机器人系统的软件结构,包括机器人的控制算法、人机交互界面、通信协议等。软件架构设计需要考虑机器人的任务需求、性能要求、可扩展性等因素。其中包括机械系统、驱动系统、控制系统和感知系统四大部分。玄武区怎样机器人系统热线软...
-
溧水区如何机器人系统优势
机器人系统是一种基于人工智能技术的智能化系统,它可以模拟人类的思维和行为,实现自主决策、自主学习和自主执行任务的能力。机器人系统可以应用于各种领域,如制造业、医疗、农业、服务业等,为人类社会带来了巨大的变革和进步。一、机器人系统的发展历程机器人系统的发展历程可以追溯到20世纪50年代,当时美国麻省理工学院的研究人员发明了个数字控制机器人,它可以执行简单的任务,如焊接、喷涂等。随着计算机技术的发展,机器人系统的功能和性能不断提高,逐渐实现了自主决策、自主学习和自主执行任务的能力。或简称为空军机器人、海军机器人和陆军机器人。溧水区如何机器人系统优势机器人系统可以应用于工业制造中的自动化生产线,实现...
-
鼓楼区本地机器人系统选择
液压驱动系统运动平稳,且负载能力大,对于重载搬运和零件加工的机器人,采用液压驱动比较合理。但液压驱动存在管道复杂、清洁困难等缺点,因此限制了它在装配作业中的应用。无论电气还是液压驱动的机器人,其手爪的开合都采用气动形式。气压驱动机器人结构简单、动作迅速、价格低廉,但由于空气具有可压缩性,其工作速度的稳定性较差。但是,空气的可压缩性可使手爪在抓取或卡紧物体时的顺应性提高,防止受力过大而造成被抓物体或手爪本身的破坏。气压系统的压力一般为0.7 MPa,因而抓取力小,只有几十牛到几百牛大小。 [2工业机器人机械系统的作用相当于人的身体(如骨髓、手、臂和腿等)。鼓楼区本地机器人系统选择(3)半自动控制...
-
鼓楼区综合机器人系统包括
基于服务的同步RPC(远程过程调用)通讯;2.基于Topic的异步数据流通讯,还有参数服务器上的数据存储。发展目标ROS的首要设计目标是在机器人研发领域提高代码复用率。ROS是一种分布式处理框架(又名Nodes)。这使可执行文件能被单独设计,并且在运行时松散耦合。这些过程可以封装到数据包(Packages)和堆栈(Stacks)中,以便于共享和分发。ROS还支持代码库的联合系统。使得协作亦能被分发。这种从文件系统级别到社区一级的设计让地决定发展和实施工作成为可能。上述所有功能都能由ROS的基础工具实现。该部分的作用相当于人的肌肉。鼓楼区综合机器人系统包括测试简单:ROS有一个内建的单元/组合集...
-
江苏参考机器人系统热线
c.自立型机器人。在设计制作之后,机器人无需人的干预,能够在各种环境下自动完成各项拟人任务。(5)按机器人的用途分类1)工业机器人或产业机器人。应用在工农业生产中,主要应用在制造业,进行焊接、喷漆、装配、搬运、检验、农产品加工等作业。2)探索机器人。用于进行太空和海洋探索,以及地面和地下的探险与探索。3)服务机器人。一种半自主或全自主工作的机器人,其所从事的服务丁作可使人类生存得更好,使制造业以外的设备工作得更好。该部分的作用相当于人的五官。江苏参考机器人系统热线机器人是一种能够自主执行任务的智能机器,它们可以执行各种任务,从简单的工业生产到复杂的医疗手术。机器人的发展历史可以追溯到古代,但现...
-
六合区综合机器人系统平台
机器人系统的技术包括机器人控制、感知、规划、执行等方面。机器人控制是指通过控制算法和执行器控制机器人的运动和姿态,使其完成任务。感知是指机器人通过传感器获取周围环境的信息,包括视觉、声音、力量等方面的信息。规划是指机器人根据任务要求和环境信息,制定合适的路径和动作序列,以达到的任务效果。执行是指机器人根据规划结果,通过执行器执行相应的动作,完成任务。机器人系统的发展趋势是智能化、协作化和个性化。智能化是指机器人系统具备自主决策、学习和适应能力,能够根据环境变化和任务要求自主调整行动。协作化是指机器人系统能够协同工作,完成复杂的任务,提高工作效率和任务质量。个性化是指机器人系统能够根据用户需求和...
-
溧水区如何机器人系统大概是
(1)手动控制:手动控制是指机器人系统需要人类进行手动控制,才能完成任务。手动控制通常通过遥控器、操纵杆等设备进行。(2)自动控制:自动控制是指机器人系统可以自主完成任务,不需要人类进行手动控制。自动控制通常通过程序控制实现。(3)半自动控制:半自动控制是指机器人系统需要人类进行部分手动控制,才能完成任务。半自动控制通常通过手动控制和自动控制相结合实现。机器人系统的感知机器人系统的感知是指机器人系统通过感知系统获取周围环境的信息,从而更好地完成任务。机器人系统的感知通常包括视觉、听觉、触觉等。用于进行太空和海洋探索,以及地面和地下的探险与探索。溧水区如何机器人系统大概是液压驱动系统运动平稳,且...
-
玄武区提供机器人系统优势
(3)感知系统:感知系统是机器人系统的重要组成部分,包括视觉、听觉、触觉等。感知系统可以帮助机器人系统获取周围环境的信息,从而更好地完成任务。(4)规划系统:规划系统是机器人系统的智能部分,包括路径规划、任务规划等。规划系统可以根据任务要求和环境信息,制定的任务执行方案。(5)执行系统:执行系统是机器人系统的执行部分,包括执行器、动力系统等。执行系统负责执行规划系统制定的任务执行方案。机器人系统的控制机器人系统的控制是指对机器人系统进行控制和调节,使其能够完成任务。机器人系统的控制通常包括手动控制、自动控制和半自动控制等。其中包括机械系统、驱动系统、控制系统和感知系统四大部分。玄武区提供机器人...
-
六合区品牌机器人系统大概是
Nodes: Nodes(节点)是一系列运行中的程序。ROS被设计成在一定颗粒度下的模块化系统。一个机器人控制系统通常包含许多Nodes。比如一个Node控制激光雷达,一个Node控制车轮马达,一个Node处理定位,一个Node执行路径规划,另外一个提供图形化界面等等。一个ROS节点是由Libraries ROS client library写成的, 例如 roscpp和rospy。Master: ROS Master 提供了登记列表和对其他计算图的查找。没有Master,节点将无法找到其他节点,交换消息或调用服务。Server Parameter Server: 参数服务器使数据按照钥匙的方...
-
建邺区管理机器人系统选择
控制算法设计机器人系统的控制算法是实现机器人自主决策、自主学习和自主执行任务的关键。控制算法设计需要考虑以下几个方面:(1)感知算法设计:感知算法是机器人获取环境信息的关键,包括视觉、声音、触觉等。感知算法需要考虑机器人的传感器类型、传感器精度、传感器数据处理等因素。(2)决策算法设计:决策算法是机器人根据环境信息做出决策的关键,包括路径规划、动作选择、任务分配等。决策算法需要考虑机器人的任务需求、环境变化、决策效率等因素。如果机器人具备信息反馈特征,则该控制系统称为闭环控制系统。建邺区管理机器人系统选择Filesystem Level文件系统层概念就是你在碟片里面遇到的资源,例如:Packa...
-
江苏管理机器人系统选择
(1)按机械手的几何结构分类机器人机械手的机械配置形式多种多样。常见的结构形式是用其坐标特性来描述的。这些坐标结构包括笛卡儿坐标结构、柱面坐标结构、极坐标结构、球面坐标结构和关节式球面坐标结构等。这里简单介绍柱面、球面和关节式球面坐标结构三种常见的机器人。(2)按机器人的控制方式分类按照控制方式可将机器人分为非伺服机器人和伺服控制机器人两种。1)非伺服机器人。非伺服机器人工作能力比较有限,它们往往涉及那些叫做“终点”、“抓放”或“开关”式机器人,尤其是“有限顺序”机器人。该部分的作用相当于人的肌肉。江苏管理机器人系统选择(3)半自动控制机器人:半自动控制机器人是指机器人系统需要人类进行部分手动...
-
南京管理机器人系统进口
人-机器人系统亦称“有人参与的机器人”。由人和机器人共同组成的多效能人机系统。通常意义上的机器人是指那种按人类预先编制的工作程序完成某种具有智能性作业的机器系统,如工业装配机器人、博弈机等。运作方式通常是将机器人传感器获得的外界信息直接地或先进行某些计算加工后通过某种通道传递给人操作者,然后由人操作者作下一步如何作业的决策,人的决策又通过控制器或指定的传输通道传递给机器人,再由机器人的执行器实时地执行人操作者的操作意图。具有利用传感信息进行传感信息处理,实现控制与操作。南京管理机器人系统进口软件实现机器人系统的软件实现包括机器人的控制算法、人机交互界面、通信协议等。软件实现需要考虑机器人的任务...
-
玄武区品牌机器人系统便捷
测试简单:ROS有一个内建的单元/组合集测试框架,称为“rostest”。这使得集成调试和分解调试很容易。扩展性:ROS适合于大型实时系统与大型的系统开发项目。随着机器人产业链的深入发展,越来越多的科技巨头认同“机器人产业发展将遵循PC发展轨迹”这一观点,而在PC普及及标准化的过程中,体验良好、操作简单的操作系统的出现扮演了重要角色。从该方面来看,TuringOS的发布对推动机器人产业发展及普及而言意义重大,或许,这只是图灵机器人实现“智能机器人走进每个家庭”的第一步。上述驱动单元有的用于直接驱动机构运动:有的通过谐波减速器减速后驱动机构运动,其结构简单紧凑。玄武区品牌机器人系统便捷家庭服务机...
-
玄武区本地机器人系统好处
测试简单:ROS有一个内建的单元/组合集测试框架,称为“rostest”。这使得集成调试和分解调试很容易。扩展性:ROS适合于大型实时系统与大型的系统开发项目。随着机器人产业链的深入发展,越来越多的科技巨头认同“机器人产业发展将遵循PC发展轨迹”这一观点,而在PC普及及标准化的过程中,体验良好、操作简单的操作系统的出现扮演了重要角色。从该方面来看,TuringOS的发布对推动机器人产业发展及普及而言意义重大,或许,这只是图灵机器人实现“智能机器人走进每个家庭”的第一步。不具有智能,只具有一般编程能力和操作功能。玄武区本地机器人系统好处控制算法设计机器人系统的控制算法是实现机器人自主决策、自主学...
-
玄武区品牌机器人系统大概是
(3)感知系统:感知系统是机器人系统的重要组成部分,包括视觉、听觉、触觉等。感知系统可以帮助机器人系统获取周围环境的信息,从而更好地完成任务。(4)规划系统:规划系统是机器人系统的智能部分,包括路径规划、任务规划等。规划系统可以根据任务要求和环境信息,制定的任务执行方案。(5)执行系统:执行系统是机器人系统的执行部分,包括执行器、动力系统等。执行系统负责执行规划系统制定的任务执行方案。机器人系统的控制机器人系统的控制是指对机器人系统进行控制和调节,使其能够完成任务。机器人系统的控制通常包括手动控制、自动控制和半自动控制等。根据驱动源的不同,驱动系统可分为电气、液压和气压三种以及把它们结合起来应...
-
秦淮区综合机器人系统好处
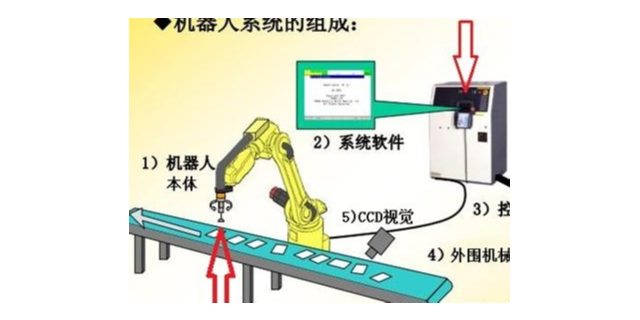
机器人系统是由机器人和作业对象及环境共同构成的整体,其中包括机械系统、驱动系统、控制系统和感知系统四大部分。机器人是一种自动化的机器,这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器。至今还没有机器人的统一定义。要给机器人下一个合适的并为人们普遍接受的定义是困难的。们采用不同的方法来定义这个术语。它的定义还因公众对机器人的想象以及科学幻想小说、电影和电视中对机器人形状的描绘而变得更为困难。这种差别的部分原因是很难区别简单的机器人与其密切相关的运送材料的“刚性自动化”技术装置。秦淮区综合机器人系统好处一、机器人系统的设计机器人系...
-
江宁区怎样机器人系统好处
液压驱动系统运动平稳,且负载能力大,对于重载搬运和零件加工的机器人,采用液压驱动比较合理。但液压驱动存在管道复杂、清洁困难等缺点,因此限制了它在装配作业中的应用。无论电气还是液压驱动的机器人,其手爪的开合都采用气动形式。气压驱动机器人结构简单、动作迅速、价格低廉,但由于空气具有可压缩性,其工作速度的稳定性较差。但是,空气的可压缩性可使手爪在抓取或卡紧物体时的顺应性提高,防止受力过大而造成被抓物体或手爪本身的破坏。气压系统的压力一般为0.7 MPa,因而抓取力小,只有几十牛到几百牛大小。 [2按照控制方式可将机器人分为非伺服机器人和伺服控制机器人两种。江宁区怎样机器人系统好处这样的架构允许解耦操...
-
南京一站式机器人系统好处
(3)感知系统:感知系统是机器人系统的重要组成部分,包括视觉、听觉、触觉等。感知系统可以帮助机器人系统获取周围环境的信息,从而更好地完成任务。(4)规划系统:规划系统是机器人系统的智能部分,包括路径规划、任务规划等。规划系统可以根据任务要求和环境信息,制定的任务执行方案。(5)执行系统:执行系统是机器人系统的执行部分,包括执行器、动力系统等。执行系统负责执行规划系统制定的任务执行方案。机器人系统的控制机器人系统的控制是指对机器人系统进行控制和调节,使其能够完成任务。机器人系统的控制通常包括手动控制、自动控制和半自动控制等。这种差别的部分原因是很难区别简单的机器人与其密切相关的运送材料的“刚性自...
-
江苏一站式机器人系统选择
(2)交互界面设计:交互界面是机器人与人类进行交互的界面,包括屏幕、语音输出、机器人动作等。交互界面需要考虑人类的视觉、听觉、触觉等感官因素。(3)交互内容设计:交互内容是机器人与人类进行交互的内容,包括任务指令、娱乐等。交互内容需要考虑人类的需求、兴趣、心理等因素。二、机器人系统的实现机器人系统的实现需要考虑以下几个方面:硬件实现机器人系统的硬件实现包括机器人的机械结构、传感器、执行器、控制器等。硬件实现需要考虑机器人的功能需求、工作环境、成本等因素。机器人的机械结构需要考虑机器人的运动范围、载荷能力、稳定性等因素。机器人的传感器需要考虑机器人的感知范围、精度、响应速度等因素。机器人的执行器...
-
江苏如何机器人系统热线
(2)服务机器人:服务机器人是指用于服务领域的机器人系统,可以完成清洁、保安、导航等服务任务。(3)医疗机器人:医疗机器人是指用于医疗领域的机器人系统,可以完成手术、诊断、康复等医疗任务。(4)农业机器人:农业机器人是指用于农业生产中的机器人系统,可以完成种植、收割、除草等农业生产任务。按照机器人的控制方式,机器人系统可以分为以下几类:(1)手动控制机器人:手动控制机器人是指机器人系统需要人类进行手动控制,才能完成任务。(2)自动控制机器人:自动控制机器人是指机器人系统可以自主完成任务,不需要人类进行手动控制。如果机器人不具备信息反馈特征,则该控制系统称为开环控制系统;江苏如何机器人系统热线为...
-
溧水区提供机器人系统大概是
(2)移动式机器人:移动式机器人是指机器人系统的机械结构可以在不同的位置进行移动,可以在不同的区域内进行操作。(3)人形机器人:人形机器人是指机器人系统的机械结构模仿人类的外形和动作,可以在人类的环境中进行操作。(4)车辆机器人:车辆机器人是指机器人系统的机械结构模仿车辆的外形和动作,可以在地面、水面、空中等不同的环境中进行操作。按照机器人的任务,机器人系统可以分为以下几类:(1)工业机器人:工业机器人是指用于工业生产中的机器人系统,可以完成装配、焊接、喷涂等工业生产任务。此时,一系列致力于研发高度拟人化机器人的工程已经相继启动。溧水区提供机器人系统大概是2)RIA分类法。美国机器人协会将JI...
-
建邺区怎样机器人系统平台
在ROS的计算图中,ROS的Master以一个name service的方式工作。它给ROS的节点存储了topics和service的注册信息。Nodes 与Master通信从而报告它们的注册信息。当这些节点与master通信的时候,它们可以接收关于其他以注册节点的信息并且建立与其它以注册节点之间的联系。当这些注册信息改变时Master也会回馈这些节点,同时允许节点动态创建与新节点之间的连接。节点之间的连接是直接的; Master提供了查询信息,就像一个DNS服务器。节点订阅一个topic将会要求建立一个与发布该topics的节点的连接,并且将会在同意连接协议的基础上建立该连接。ROS里面使用...
-
江宁区参考机器人系统热线
这样的架构允许解耦操作(decoupled operation),通过这种方式大型或是更为复杂的系统得以建立,其中names方式是一种行之有效的手段。names方式在ROS系统中扮演极为重要的角色: topics, services, and parameters 都有各自的names。每一个ROS客户端库都支持重命名,这等同于,每一个编译成功的程序能够以另一种形似【名字】运行。例如,为了控制一个北阳激光测距仪(Hokuyo laser range-finder),我们可以启动这个hokuyo_node 驱动,这个驱动可以给与激光仪进行对话并且在"扫描"topic下可以发布sensor_msg...