商机详情 -
无锡Ether CAT多圈1213编码器供应商
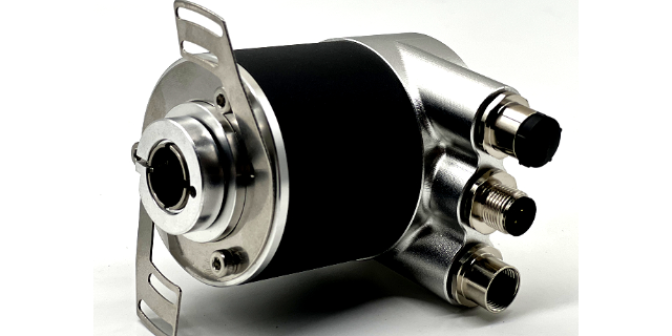
Ether CAT多圈绝对值编码器:接口介绍输出信号EtherCAT传输速率10/100Mbit接口周期时间≥80µs线性分辨率1/4096FS~1/16384FS可选可编程功能单圈分辨率,信号计数方向,预置输出驱动器Ethernet。机械参数最大转速6000转/分主轴负载轴向40N,径向100N主轴材质不锈钢外壳材质铝抗冲击1000m/s²(6ms),等于100g抗振动200m/s²(10-2000Hz),等于20g允许轴向窜动±1.5mm允许径向跳动±0.2mm外形结构60mm外径,实心轴,盲孔轴连接形式侧出M12插头(后出M8可选)。它可以适应不同的控制方式和应用需求。无锡Ether CAT多圈1213编码器供应商

选择合适的EtherCAT总线绝对值编码器需要考虑以下几个方面:1.分辨率:分辨率是指编码器输出的每个脉冲所的角度或线性位移的大小。选择合适的分辨率取决于应用的精度要求和运动控制系统的要求。2.精度:精度是指编码器输出的角度或线性位移与实际位置之间的误差。选择精度高的编码器可以提高系统的精度和稳定性。3.速度:速度是指编码器能够测量的最大转速或线速度。选择合适的速度范围可以确保编码器在高速运动时仍能保持准确。4.环境适应性:选择适合应用环境的编码器,例如防尘、防水、抗震等特性。5.供电电压:选择与系统供电电压匹配的编码器,以确保正常工作。6.接口类型:选择与系统控制器兼容的接口类型,例如EtherCAT总线。7.安装方式:选择适合应用的安装方式,例如轴承式、法兰式、螺纹式等。综合考虑以上因素,选择合适的EtherCAT总线绝对值编码器可以提高系统的性能和稳定性。无锡Ether CAT多圈1213编码器报价它可以提供高可靠性和稳定性。
EtherCAT总线值编码器的工作原理如下:1.EtherCAT总线值编码器通过在轴上安装编码器来测量轴的位置和速度。2.编码器将位置和速度信息转换为数字信号,并将其发送到EtherCAT总线。3.EtherCAT总线将这些数字信号传输到控制器,控制器可以使用这些信息来控制轴的运动。4.由于EtherCAT总线是一种高速、实时的通信协议,因此可以实现非常精确的位置和速度控制。5.值编码器可以提供轴的位置信息,这意味着即使系统断电或重新启动,控制器也可以知道轴的准确位置。6.EtherCAT总线编码器通常用于需要高精度位置控制的应用,例如机床、印刷机、自动化生产线等。
EtherCAT总线绝对值编码器的安装和调试非常简单。它可以通过简单的连接和配置来实现快速安装和调试,可以有效缩短设备的调试时间和成本。EtherCAT总线绝对值编码器具有高可靠性和稳定性。它采用了先进的技术和材料,可以在恶劣的工作环境下保持稳定的工作状态,可以满足各种工业自动化设备的需求。EtherCAT总线绝对值编码器可以实现多轴控制。它可以同时控制多个轴,可以实现复杂的运动控制和定位,可以满足各种工业自动化设备的需求。它可以减少机器故障和停机时间。

Ether CAT多圈绝对值编码器:电气参数工作电压10-30Vdc(5Vdc可定制)功耗小于2W输出信号EtherCAT工业以太网启动时间<1s反极性保护有短路保护有重复定位精度小于2BitIP等级IP65/IP67工作温度-40℃~85℃储存温度-40℃~85℃温度98%相对湿度,无凝结状态。机械参数最大转速6000转/分主轴负载轴向40N,径向100N主轴材质不锈钢外壳材质铝抗冲击1000m/s²(6ms),等于100g抗振动200m/s²(10-2000Hz),等于20g允许轴向窜动±1.5mm允许径向跳动±0.2mm外形结构60mm外径,实心轴,盲孔轴连接形式侧出M12插头(后出M8可选)。它可以适应不同的通信协议和应用需求。泰州Ether CAT协议编码器报价
EtherCAT总线绝对值编码器它可以提供高分辨率和精度。无锡Ether CAT多圈1213编码器供应商
EtherCAT总线绝对值编码器的安装和调试步骤如下:1.确定编码器的安装位置和方向,并将其固定在机械结构上。2.连接编码器的电源和信号线,确保连接正确无误。3.配置EtherCAT总线控制器的参数,包括通信速率、节点地址等。4.在EtherCAT总线控制器上添加编码器的节点,并设置其参数,如分辨率、零点校准等。5.进行编码器的零点校准,确保编码器输出的零位信号与机械结构的零位一致。6.进行编码器的角度校准,通过旋转机械结构,记录编码器输出的角度值,与实际角度进行比较,进行校准。7.进行编码器的运动测试,通过控制机械结构的运动,观察编码器输出的角度值是否与实际角度一致。8.调试完成后,保存参数并进行系统测试,确保编码器的正常工作。无锡Ether CAT多圈1213编码器供应商