商机详情 -
江苏一站式机器人系统选择
机器人系统的技术包括机器人控制、感知、规划、执行等方面。机器人控制是指通过控制算法和执行器控制机器人的运动和姿态,使其完成任务。感知是指机器人通过传感器获取周围环境的信息,包括视觉、声音、力量等方面的信息。规划是指机器人根据任务要求和环境信息,制定合适的路径和动作序列,以达到的任务效果。执行是指机器人根据规划结果,通过执行器执行相应的动作,完成任务。机器人系统的发展趋势是智能化、协作化和个性化。智能化是指机器人系统具备自主决策、学习和适应能力,能够根据环境变化和任务要求自主调整行动。协作化是指机器人系统能够协同工作,完成复杂的任务,提高工作效率和任务质量。个性化是指机器人系统能够根据用户需求和任务要求,进行个性化定制和优化,提供更加贴合用户需求的服务。该部分的作用相当于人的大脑。江苏一站式机器人系统选择
2)伺服控制机器人。伺服控制机器人比非伺服机器人有更强的工作能力,因而价格较贵,而且在某些情况下不如简单的机器人可靠。伺服控制机器人又可分为点位伺服控制和连续路径(轨迹)伺服控制两种。(3)按机器人控制器的信息输人方式分类在采用这种分类法进行分类时,对于不同国家也略有不同,但它们能够有统一的标准。这里主要介绍日本工业机器人协会(JIRA)、美国机器人协会(RIA)和法国工业机器人协会(AFRI)所采用的分类法。1)JIRA分类法。日本工业机器人协会将机器人分为六类:手动操作手、定序机器人、变序机器人、复演式机器人、程控机器人和智能机器人。其中,智能机器人能够采用传感信息来检测其工作环境或工作条件的变化,并借助其自我决策能力,成功地进行相应的工作,而不管其执行任务的环境条件发生了什么变化。江苏一站式机器人系统选择用于进行太空和海洋探索,以及地面和地下的探险与探索。
为了实现“共享与协作”这一首要目标,人们制订了ROS架构中的其他支援性目标:“轻便”:ROS是设计得尽可能方便简易。您不必替换主框架与系统,因为ROS编写的代码可以用于其他机器人软件框架中。毫无疑问的,ROS更易于集成与其他机器人软件框架。事实上ROS已完成与OpenRAVE、Orocos和Player的整合。ROS-agnostic库:【agnostic:不可知论】建议的开发模型是使用clear的函数接口书写ROS-agnostic库。语言性:ROS框架很容易在任何编程语言中执行。我们已经能在Python和C++中顺利运行,同时添加有Lisp、Octave和Java语言库。
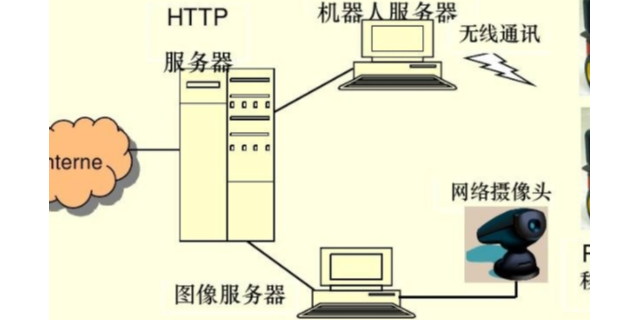
在ROS的计算图中,ROS的Master以一个name service的方式工作。它给ROS的节点存储了topics和service的注册信息。Nodes 与Master通信从而报告它们的注册信息。当这些节点与master通信的时候,它们可以接收关于其他以注册节点的信息并且建立与其它以注册节点之间的联系。当这些注册信息改变时Master也会回馈这些节点,同时允许节点动态创建与新节点之间的连接。节点之间的连接是直接的; Master提供了查询信息,就像一个DNS服务器。节点订阅一个topic将会要求建立一个与发布该topics的节点的连接,并且将会在同意连接协议的基础上建立该连接。ROS里面使用广的连接协议是TCPROS,这个协议使用标准的TCP/IP 接口。此时,一系列致力于研发高度拟人化机器人的工程已经相继启动。

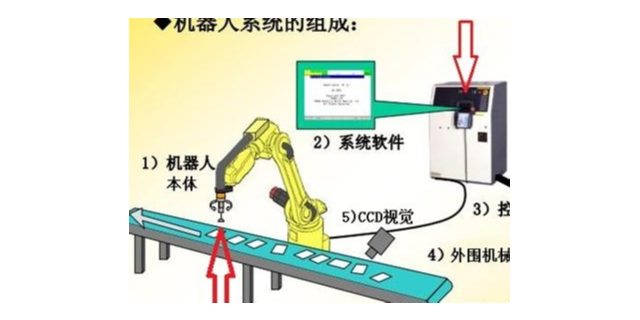
机器人系统是由机器人和作业对象及环境共同构成的,其中包括机械系统、驱动系统、控制系统和感知系统四大部分。机械系统工业机器人的机械系统包括机身、臂部、手腕、末端操作器和行走机构等部分,每一部分都有若干自由度,从而构成一个多自由度的机械系统。此外,有的机器人还具备行走机构。若机器人具备行走机构,则构成行走机器人;若机器人不具备行走及腰转机构,则构成单机器人臂。末端操作器是直接装在手腕上的一个重要部件,它可以是两手指或多手指的手爪,也可以是喷漆枪、焊枪等作业工具。工业机器人机械系统的作用相当于人的身体(如骨髓、手、臂和腿等)。 [2]伺服控制机器人比非伺服机器人有更强的工作能力,因而价格较贵,而且在某些情况下不如简单的机器人可靠。江苏一站式机器人系统选择
这里主要介绍日本工业机器人协会(JIRA)、美国机器人协会(RIA)和法国工业机器人协会(AFRI)所采用的分类法。江苏一站式机器人系统选择
(1)按机械手的几何结构分类机器人机械手的机械配置形式多种多样。常见的结构形式是用其坐标特性来描述的。这些坐标结构包括笛卡儿坐标结构、柱面坐标结构、极坐标结构、球面坐标结构和关节式球面坐标结构等。这里简单介绍柱面、球面和关节式球面坐标结构三种常见的机器人。(2)按机器人的控制方式分类按照控制方式可将机器人分为非伺服机器人和伺服控制机器人两种。1)非伺服机器人。非伺服机器人工作能力比较有限,它们往往涉及那些叫做“终点”、“抓放”或“开关”式机器人,尤其是“有限顺序”机器人。江苏一站式机器人系统选择
南京晟睿达机械有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在江苏省等地区的商务服务中汇聚了大量的人脉以及**,在业界也收获了很多良好的评价,这些都源自于自身的努力和大家共同进步的结果,这些评价对我们而言是比较好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同南京晟睿达机械供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!