商机详情 -
江苏如何机器人系统大概是
这样的架构允许解耦操作(decoupled operation),通过这种方式大型或是更为复杂的系统得以建立,其中names方式是一种行之有效的手段。names方式在ROS系统中扮演极为重要的角色: topics, services, and parameters 都有各自的names。每一个ROS客户端库都支持重命名,这等同于,每一个编译成功的程序能够以另一种形似【名字】运行。例如,为了控制一个北阳激光测距仪(Hokuyo laser range-finder),我们可以启动这个hokuyo_node 驱动,这个驱动可以给与激光仪进行对话并且在"扫描"topic下可以发布sensor_msgs/LaserScan 的信息。如果机器人具备信息反馈特征,则该控制系统称为闭环控制系统。江苏如何机器人系统大概是
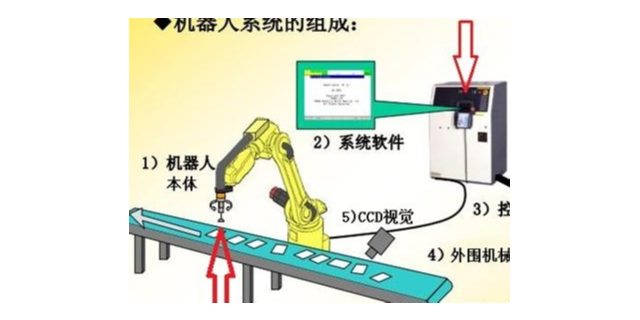
(1)按机械手的几何结构分类机器人机械手的机械配置形式多种多样。常见的结构形式是用其坐标特性来描述的。这些坐标结构包括笛卡儿坐标结构、柱面坐标结构、极坐标结构、球面坐标结构和关节式球面坐标结构等。这里简单介绍柱面、球面和关节式球面坐标结构三种常见的机器人。(2)按机器人的控制方式分类按照控制方式可将机器人分为非伺服机器人和伺服控制机器人两种。1)非伺服机器人。非伺服机器人工作能力比较有限,它们往往涉及那些叫做“终点”、“抓放”或“开关”式机器人,尤其是“有限顺序”机器人。浦口区管理机器人系统选择在采用这种分类法进行分类时,对于不同国家也略有不同,但它们能够有统一的标准。
(1)手动控制:手动控制是指机器人系统需要人类进行手动控制,才能完成任务。手动控制通常通过遥控器、操纵杆等设备进行。(2)自动控制:自动控制是指机器人系统可以自主完成任务,不需要人类进行手动控制。自动控制通常通过程序控制实现。(3)半自动控制:半自动控制是指机器人系统需要人类进行部分手动控制,才能完成任务。半自动控制通常通过手动控制和自动控制相结合实现。机器人系统的感知机器人系统的感知是指机器人系统通过感知系统获取周围环境的信息,从而更好地完成任务。机器人系统的感知通常包括视觉、听觉、触觉等。
机器人是一种能够自主执行任务的智能机器,它们可以执行各种任务,从简单的工业生产到复杂的医疗手术。机器人的发展历史可以追溯到古代,但现代机器人的发展始于20世纪初。随着科技的不断进步,机器人的功能和应用范围也在不断扩大。机器人的分类机器人可以按照不同的分类方式进行分类,以下是几种常见的分类方式:1.按照功能分类根据机器人的功能,可以将其分为以下几类:(1)工业机器人:主要用于工业生产线上的自动化生产,如汽车制造、电子产品制造等。用于进行太空和海洋探索,以及地面和地下的探险与探索。

Messages:节点之间通过messages来传递消息。一个message是一个简单的数据结构,包含一些归类定义的区。支持标准的原始数据类型(整数、浮点数、布尔数,等)和原始数组类型。message可以包含任意的嵌套结构和数组(很类似于C语言的结构structs)Topics: Messages以一种发布/订阅的方式传递。一个node可以在一个给定的topic中发布消息。Topic是一个name被用于描述消息内容。一个node针对某个topic关注与订阅特定类型的数据。可能同时有多个node发布或者订阅同一个topic的消息;也可能有一个node同时发布或订阅多个topic。总体上,发布者和订阅者不了解彼此的存在。主要的概念在于将信息的发布者和需求者解耦、分离。逻辑上,topic可以看作是一个严格规范化的消息bus。每个bus有一个名字,每个node都可以连接到bus发送和接受符合标准类型的消息。电气驱动系统在工业机器人中应用得较普遍,可分为步进电动机、直流伺服电动机交流伺服电动机三种驱动形式。浦口区品牌机器人系统平台
如果机器人不具备信息反馈特征,则该控制系统称为开环控制系统;江苏如何机器人系统大概是
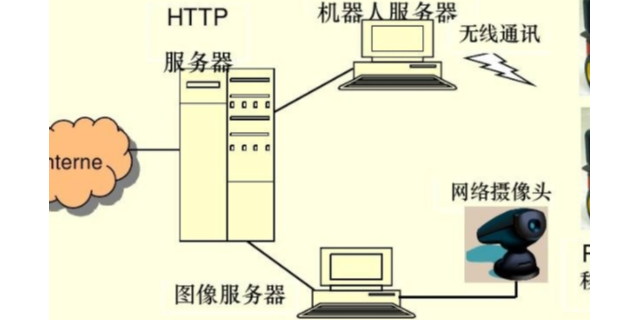
在ROS的计算图中,ROS的Master以一个name service的方式工作。它给ROS的节点存储了topics和service的注册信息。Nodes 与Master通信从而报告它们的注册信息。当这些节点与master通信的时候,它们可以接收关于其他以注册节点的信息并且建立与其它以注册节点之间的联系。当这些注册信息改变时Master也会回馈这些节点,同时允许节点动态创建与新节点之间的连接。节点之间的连接是直接的; Master提供了查询信息,就像一个DNS服务器。节点订阅一个topic将会要求建立一个与发布该topics的节点的连接,并且将会在同意连接协议的基础上建立该连接。ROS里面使用广的连接协议是TCPROS,这个协议使用标准的TCP/IP 接口。江苏如何机器人系统大概是
南京晟睿达机械有限公司在同行业领域中,一直处在一个不断锐意进取,不断制造创新的市场高度,多年以来致力于发展富有创新价值理念的产品标准,在江苏省等地区的商务服务中始终保持良好的商业口碑,成绩让我们喜悦,但不会让我们止步,残酷的市场磨炼了我们坚强不屈的意志,和谐温馨的工作环境,富有营养的公司土壤滋养着我们不断开拓创新,勇于进取的无限潜力,南京晟睿达机械供应携手大家一起走向共同辉煌的未来,回首过去,我们不会因为取得了一点点成绩而沾沾自喜,相反的是面对竞争越来越激烈的市场氛围,我们更要明确自己的不足,做好迎接新挑战的准备,要不畏困难,激流勇进,以一个更崭新的精神面貌迎接大家,共同走向辉煌回来!