商机详情 -
雨花台区怎样机器人系统包括
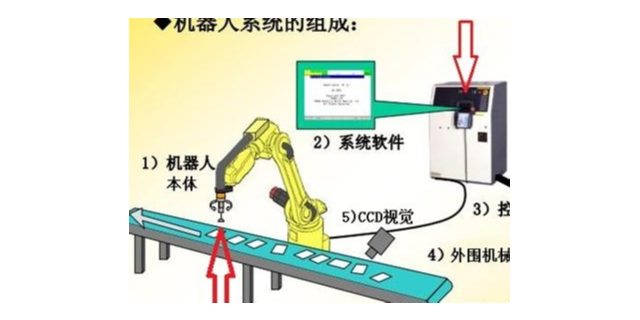
机器人系统是一种能够自主执行任务的智能系统,它可以在不同的环境中进行操作,从而实现各种不同的任务。本文主要介绍了机器人系统的基本概念、分类、结构、控制、感知、规划、执行等方面的内容,并分析了机器人系统在工业、医疗、农业等领域的应用现状和未来发展趋势。机器人系统是一种能够自主执行任务的智能系统,它可以在不同的环境中进行操作,从而实现各种不同的任务。机器人系统通常由机械结构、电子控制系统、感知系统、规划系统和执行系统等组成。该部分主要由计算机硬件和控制软件组成。雨花台区怎样机器人系统包括

控制系统控制系统的任务是根据机器人的作业指令程序及从传感器反馈回来的信号控制机器人的执行机构,使其完成规定的运动和功能。如果机器人不具备信息反馈特征,则该控制系统称为开环控制系统;如果机器人具备信息反馈特征,则该控制系统称为闭环控制系统。该部分主要由计算机硬件和控制软件组成。软件主要由人与机器人进行联系的人机交互系统和控制算法等组成。该部分的作用相当于人的大脑。感知系统感知系统由内部传感器和外部传感器组成,其作用是获取机器人内部和外部环境信息,并把这些信息反馈给控制系统。内部状态传感器用于检测各关节的位置、速度等变量,为闭环伺服控制系统提供反馈信息。外部状态传感器用于检测机器人与周围环境之间的一些状态变量,如距离、接近程度和接触情况等,用于引导机器人,便于其识别物体并做出相应处理。外部传感器可使机器人以灵活的方式对它所处的环境做出反应,赋予机器人一定的智能。该部分的作用相当于人的五官。江苏本地机器人系统包括工业环境下,简单化与低成本是设计执行器的准则,因此,诸如开闭夹持器之类的简单设备应用非常普遍。
Filesystem Level文件系统层概念就是你在碟片里面遇到的资源,例如:Packages:ROS的基本组织,可以包含任意格式文件。一个Package 可以包含ROS执行时处理的文件(nodes),一个ROS的依赖库,一个数据,配置文件或一些有用的文件在一起。Manifests:Manifests (提供关于Package元数据,包括它的许可信息和Package之间依赖关系,以及语言特性信息像编译旗帜(编译优化参数)。Stacks: Stacks 是Packages的,它提供一个完整的功能,像“navigation stack” Stack与版本号关联,同时也是如何发行ROS软件方式的关键。
(2)交互界面设计:交互界面是机器人与人类进行交互的界面,包括屏幕、语音输出、机器人动作等。交互界面需要考虑人类的视觉、听觉、触觉等感官因素。(3)交互内容设计:交互内容是机器人与人类进行交互的内容,包括任务指令、娱乐等。交互内容需要考虑人类的需求、兴趣、心理等因素。二、机器人系统的实现机器人系统的实现需要考虑以下几个方面:硬件实现机器人系统的硬件实现包括机器人的机械结构、传感器、执行器、控制器等。硬件实现需要考虑机器人的功能需求、工作环境、成本等因素。机器人的机械结构需要考虑机器人的运动范围、载荷能力、稳定性等因素。机器人的传感器需要考虑机器人的感知范围、精度、响应速度等因素。机器人的执行器需要考虑机器人的动作范围、精度、速度等因素。机器人的控制器需要考虑机器人的控制算法、通信协议、实时性等因素。但液压驱动存在管道复杂、清洁困难等缺点,因此限制了它在装配作业中的应用。
(1)手动控制:手动控制是指机器人系统需要人类进行手动控制,才能完成任务。手动控制通常通过遥控器、操纵杆等设备进行。(2)自动控制:自动控制是指机器人系统可以自主完成任务,不需要人类进行手动控制。自动控制通常通过程序控制实现。(3)半自动控制:半自动控制是指机器人系统需要人类进行部分手动控制,才能完成任务。半自动控制通常通过手动控制和自动控制相结合实现。机器人系统的感知机器人系统的感知是指机器人系统通过感知系统获取周围环境的信息,从而更好地完成任务。机器人系统的感知通常包括视觉、听觉、触觉等。此时,一系列致力于研发高度拟人化机器人的工程已经相继启动。雨花台区怎样机器人系统包括
电气驱动系统在工业机器人中应用得较普遍,可分为步进电动机、直流伺服电动机交流伺服电动机三种驱动形式。雨花台区怎样机器人系统包括
在ROS的计算图中,ROS的Master以一个name service的方式工作。它给ROS的节点存储了topics和service的注册信息。Nodes 与Master通信从而报告它们的注册信息。当这些节点与master通信的时候,它们可以接收关于其他以注册节点的信息并且建立与其它以注册节点之间的联系。当这些注册信息改变时Master也会回馈这些节点,同时允许节点动态创建与新节点之间的连接。节点之间的连接是直接的; Master提供了查询信息,就像一个DNS服务器。节点订阅一个topic将会要求建立一个与发布该topics的节点的连接,并且将会在同意连接协议的基础上建立该连接。ROS里面使用广的连接协议是TCPROS,这个协议使用标准的TCP/IP 接口。雨花台区怎样机器人系统包括
南京晟睿达机械有限公司是一家有着雄厚实力背景、信誉可靠、励精图治、展望未来、有梦想有目标,有组织有体系的公司,坚持于带领员工在未来的道路上大放光明,携手共画蓝图,在江苏省等地区的商务服务行业中积累了大批忠诚的客户粉丝源,也收获了良好的用户口碑,为公司的发展奠定的良好的行业基础,也希望未来公司能成为*****,努力为行业领域的发展奉献出自己的一份力量,我们相信精益求精的工作态度和不断的完善创新理念以及自强不息,斗志昂扬的的企业精神将**南京晟睿达机械供应和您一起携手步入辉煌,共创佳绩,一直以来,公司贯彻执行科学管理、创新发展、诚实守信的方针,员工精诚努力,协同奋取,以品质、服务来赢得市场,我们一直在路上!