商机详情 -
高淳区参考机器人系统平台
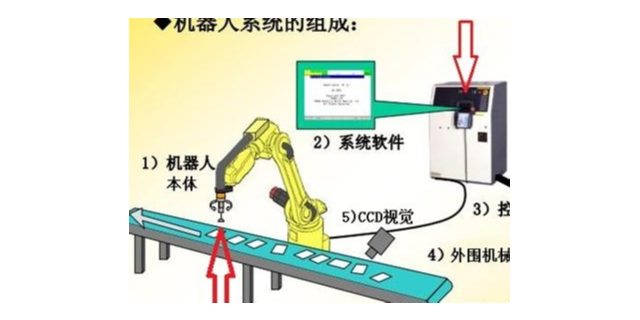
机器人系统是指由多个机器人组成的系统,这些机器人可以协同工作,完成各种任务。机器人系统通常由硬件和软件两部分组成,硬件包括机器人本身和相关的传感器、执行器等设备,软件则包括控制算法、路径规划、任务分配等程序。机器人系统的应用范围非常,包括工业制造、医疗保健、防卫、环境监测、教育培训等领域。在工业制造中,机器人系统可以完成各种重复性、高精度的工作,提高生产效率和产品质量。在医疗保健中,机器人系统可以协助医生进行手术、康复训练等工作,提高医疗水平和效果。在防卫中,机器人系统可以执行侦察、排雷、拆弹等任务,保障士兵的安全。在环境监测中,机器人系统可以进行水质、空气等方面的监测,提高环境保护水平。在教育培训中,机器人系统可以帮助学生学习编程、机器人控制等知识,提高科技素养。电气驱动系统在工业机器人中应用得较普遍,可分为步进电动机、直流伺服电动机交流伺服电动机三种驱动形式。高淳区参考机器人系统平台
家庭服务机器人系统可以应用于家庭服务中的家庭机器人、智能家居等,实现家庭服务过程的自动化和智能化。机器人系统可以根据家庭成员的需求自主决策、自主学习和自主执行任务,提高家庭服务效率和家庭生活质量。四、总结机器人系统是一种基于人工智能技术的智能化系统,它可以模拟人类的思维和行为,实现自主决策、自主学习和自主执行任务的能力。机器人系统的设计、实现和应用需要考虑系统架构、控制算法、人机交互等多个方面。机器人系统的应用范高淳区参考机器人系统平台其中较为、有NASA/JPLE的Robonaut(见图2),DLR的设备以及许多正在开发的拟人机器人。
Messages:节点之间通过messages来传递消息。一个message是一个简单的数据结构,包含一些归类定义的区。支持标准的原始数据类型(整数、浮点数、布尔数,等)和原始数组类型。message可以包含任意的嵌套结构和数组(很类似于C语言的结构structs)Topics: Messages以一种发布/订阅的方式传递。一个node可以在一个给定的topic中发布消息。Topic是一个name被用于描述消息内容。一个node针对某个topic关注与订阅特定类型的数据。可能同时有多个node发布或者订阅同一个topic的消息;也可能有一个node同时发布或订阅多个topic。总体上,发布者和订阅者不了解彼此的存在。主要的概念在于将信息的发布者和需求者解耦、分离。逻辑上,topic可以看作是一个严格规范化的消息bus。每个bus有一个名字,每个node都可以连接到bus发送和接受符合标准类型的消息。
软件实现机器人系统的软件实现包括机器人的控制算法、人机交互界面、通信协议等。软件实现需要考虑机器人的任务需求、性能要求、可扩展性等因素。机器人的控制算法需要考虑机器人的感知能力、决策能力、执行能力等因素。机器人的人机交互界面需要考虑机器人的交互方式、交互界面、交互内容等因素。机器人的通信协议需要考虑机器人与其他设备的通信方式、通信协议、数据传输速度等因素。三、机器人系统的应用机器人系统的应用非常,可以应用于工业制造、医疗保健、农业生产、家庭服务等领域。以下是机器人系统的几个应用案例:工业制造该部分的作用相当于人的五官。
一、机器人系统的设计机器人系统的设计需要考虑以下几个方面:系统架构设计机器人系统的架构设计是整个系统的基础,它决定了系统的性能、可靠性和可扩展性。机器人系统的架构设计应该包括以下几个方面:(1)硬件架构设计:硬件架构设计是机器人系统的物理结构,包括机器人的机械结构、传感器、执行器、控制器等。硬件架构设计需要考虑机器人的功能需求、工作环境、成本等因素。2)软件架构设计:软件架构设计是机器人系统的软件结构,包括机器人的控制算法、人机交互界面、通信协议等。软件架构设计需要考虑机器人的任务需求、性能要求、可扩展性等因素。不具有智能,只具有一般编程能力和操作功能。江宁区如何机器人系统优势
气压驱动机器人结构简单、动作迅速、价格低廉,但由于空气具有可压缩性,其工作速度的稳定性较差。高淳区参考机器人系统平台
为了处理数据,我们也许会写一个使用laser_filters的node来订阅"扫描"topic的信息。订阅之后,我们的过滤器将会自动开始接收激光仪的信息。 注意两边是如何脱钩工作的。 所有的hokuyo_node的节点都会完成发布"扫描",不需要知道是否有节点被订阅了。所有的过滤器都会完成"扫描"的订阅,不论知道还是不知道是否有节点在发布"扫描"。 在不引发任何错误的情况下,这两个nodes可以任何的顺序启动,终止,或者重启。以后我们也许会给我们的机器人加入另外一个激光器,这会导致我们重新设置我们的系统。我们所需要做的就是重新映射已经使用过的names。当我们开始我们的个hokuyo_node时,我们可以说它用base_scan代替了映射扫描,并且和我们的过滤器节点做相同的事。这些节点将会用base_scan的topic来通信从而代替,并且将不再"扫描"topic的信息。然后我们就可以为我们的新激光测距仪启动另外一个hokuyo_node。高淳区参考机器人系统平台
南京晟睿达机械有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在江苏省等地区的商务服务中汇聚了大量的人脉以及**,在业界也收获了很多良好的评价,这些都源自于自身的努力和大家共同进步的结果,这些评价对我们而言是比较好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同南京晟睿达机械供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!