商机详情 -
雨花台区本地机器人系统热线
为了处理数据,我们也许会写一个使用laser_filters的node来订阅"扫描"topic的信息。订阅之后,我们的过滤器将会自动开始接收激光仪的信息。 注意两边是如何脱钩工作的。 所有的hokuyo_node的节点都会完成发布"扫描",不需要知道是否有节点被订阅了。所有的过滤器都会完成"扫描"的订阅,不论知道还是不知道是否有节点在发布"扫描"。 在不引发任何错误的情况下,这两个nodes可以任何的顺序启动,终止,或者重启。以后我们也许会给我们的机器人加入另外一个激光器,这会导致我们重新设置我们的系统。我们所需要做的就是重新映射已经使用过的names。当我们开始我们的个hokuyo_node时,我们可以说它用base_scan代替了映射扫描,并且和我们的过滤器节点做相同的事。这些节点将会用base_scan的topic来通信从而代替,并且将不再"扫描"topic的信息。然后我们就可以为我们的新激光测距仪启动另外一个hokuyo_node。手动操作手、定序机器人、变序机器人、复演式机器人、程控机器人和智能机器人。雨花台区本地机器人系统热线
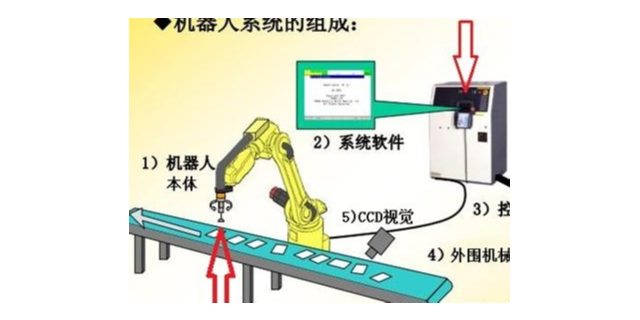
机器人系统实际上是一个典型的机电一体化系统,其工作原理为:控制系统发出动作指令,控制驱动器动作,驱动器带动机械系统运动,使末端操作器到达空间某一位置和实现某一姿态,实施一定的作业任务。末端操作器在空间的实际位姿由感知系统反馈给控制系统,控制系统把实际位姿与目标位姿相比较,发出下一个动作指令,如此循环,直到完成作业任务为止机器人的分类方法很多。这里首先介绍i种分类法,即按机械手的几何结构、机器人的控制方式以及机器人的信息输入方式。六合区参考机器人系统热线外部传感器可使机器人以灵活的方式对它所处的环境做出反应,赋予机器人一定的智能。

2)RIA分类法。美国机器人协会将JIRA分类法中的后四种机器当做机器人。(4)按机器人的智能程度分类1)一般机器人。不具有智能,只具有一般编程能力和操作功能。2)智能机器人。具有不同程度的智能,又可分为:a.传感型机器人。具有利用传感信息(包括视觉、听觉、触觉、接近觉、力觉和红外、超声及激光等)进行传感信息处理,实现控制与操作。b.交互型机器人。机器人通过计算机系统与操作员或程序员进行人机对话,实现对机器人的控制与操作。
软件实现机器人系统的软件实现包括机器人的控制算法、人机交互界面、通信协议等。软件实现需要考虑机器人的任务需求、性能要求、可扩展性等因素。机器人的控制算法需要考虑机器人的感知能力、决策能力、执行能力等因素。机器人的人机交互界面需要考虑机器人的交互方式、交互界面、交互内容等因素。机器人的通信协议需要考虑机器人与其他设备的通信方式、通信协议、数据传输速度等因素。三、机器人系统的应用机器人系统的应用非常,可以应用于工业制造、医疗保健、农业生产、家庭服务等领域。以下是机器人系统的几个应用案例:工业制造该部分主要由计算机硬件和控制软件组成。
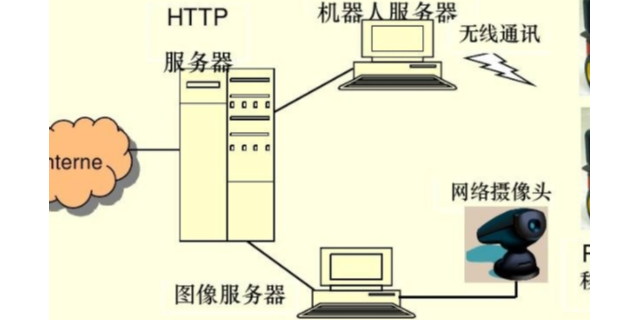
Nodes: Nodes(节点)是一系列运行中的程序。ROS被设计成在一定颗粒度下的模块化系统。一个机器人控制系统通常包含许多Nodes。比如一个Node控制激光雷达,一个Node控制车轮马达,一个Node处理定位,一个Node执行路径规划,另外一个提供图形化界面等等。一个ROS节点是由Libraries ROS client library写成的, 例如 roscpp和rospy。Master: ROS Master 提供了登记列表和对其他计算图的查找。没有Master,节点将无法找到其他节点,交换消息或调用服务。Server Parameter Server: 参数服务器使数据按照钥匙的方式存储。参数服务器是主持的组成部分。这些坐标结构包括笛卡儿坐标结构、柱面坐标结构、极坐标结构、球面坐标结构和关节式球面坐标结构等。六合区参考机器人系统热线
机器人。用于目的,或进攻性的,或防御性的。雨花台区本地机器人系统热线
Stack manifests :提供关于Stack元数据,包括它的许可信息和Stack之间依赖关系。Message (msg) types: 信息描述, 位置在路径:my_package/msg/MyMessageT定义数据类型在ROS的 messages ROS里面。Service (srv) types: 服务描述,位置在路径:my_package/srv/MyServiceT定义这个请求和相应的数据结构 在ROS services 里面。Computation Graph Level(计算图)就是用ROS的P2P(peer-to-peer网络传输协议)网络集中处理所有的数据。基本的Computation Graph的概念包括Node, Master, Parameter Server,messages, services, topics, 和bags, 以上所有的这些都以不同的方式给Graph传输数据。雨花台区本地机器人系统热线
南京晟睿达机械有限公司汇集了大量的优秀人才,集企业奇思,创经济奇迹,一群有梦想有朝气的团队不断在前进的道路上开创新天地,绘画新蓝图,在江苏省等地区的商务服务中始终保持良好的信誉,信奉着“争取每一个客户不容易,失去每一个用户很简单”的理念,市场是企业的方向,质量是企业的生命,在公司有效方针的领导下,全体上下,团结一致,共同进退,齐心协力把各方面工作做得更好,努力开创工作的新局面,公司的新高度,未来南京晟睿达机械供应和您一起奔向更美好的未来,即使现在有一点小小的成绩,也不足以骄傲,过去的种种都已成为昨日我们只有总结经验,才能继续上路,让我们一起点燃新的希望,放飞新的梦想!