商机详情 -
南京参考机器人系统介绍
这样的架构允许解耦操作(decoupled operation),通过这种方式大型或是更为复杂的系统得以建立,其中names方式是一种行之有效的手段。names方式在ROS系统中扮演极为重要的角色: topics, services, and parameters 都有各自的names。每一个ROS客户端库都支持重命名,这等同于,每一个编译成功的程序能够以另一种形似【名字】运行。例如,为了控制一个北阳激光测距仪(Hokuyo laser range-finder),我们可以启动这个hokuyo_node 驱动,这个驱动可以给与激光仪进行对话并且在"扫描"topic下可以发布sensor_msgs/LaserScan 的信息。灵巧型多指机器人手由于其可靠性、复杂性和成本等问题尚未被应用与任何主要的生产领域。南京参考机器人系统介绍
二、机器人系统的应用领域制造业机器人系统在制造业中的应用非常,可以用于生产线上的各种任务,如装配、搬运、焊接、喷涂等。机器人系统可以提高生产效率和产品质量,减少人力成本和生产事故。医疗机器人系统在医疗领域中的应用也越来越,可以用于手术、康复、护理等方面。机器人系统可以提高手术精度和安全性,减少手术时间和创伤,同时可以为患者提供更好的康复和护理服务。农业机器人系统在农业领域中的应用也越来越受到关注,可以用于种植、收割、施肥等方面。机器人系统可以提高农业生产效率和品质,减少人力成本和农药使用量,同时可以为农民提供更好的工作环境和生活条件。秦淮区如何机器人系统便捷该部分的作用相当于人的大脑。
为了处理数据,我们也许会写一个使用laser_filters的node来订阅"扫描"topic的信息。订阅之后,我们的过滤器将会自动开始接收激光仪的信息。 注意两边是如何脱钩工作的。 所有的hokuyo_node的节点都会完成发布"扫描",不需要知道是否有节点被订阅了。所有的过滤器都会完成"扫描"的订阅,不论知道还是不知道是否有节点在发布"扫描"。 在不引发任何错误的情况下,这两个nodes可以任何的顺序启动,终止,或者重启。以后我们也许会给我们的机器人加入另外一个激光器,这会导致我们重新设置我们的系统。我们所需要做的就是重新映射已经使用过的names。当我们开始我们的个hokuyo_node时,我们可以说它用base_scan代替了映射扫描,并且和我们的过滤器节点做相同的事。这些节点将会用base_scan的topic来通信从而代替,并且将不再"扫描"topic的信息。然后我们就可以为我们的新激光测距仪启动另外一个hokuyo_node。
为了规定技术、开发机器人新的工作能力和比较不同国家和公司的成果,就需要对机器人这一术语有某些共同的理解。世界上对机器人还没有统一的定义,各国有自己的定义。这些定义之间差别较大。这种差别的部分原因是很难区别简单的机器人与其密切相关的运送材料的“刚性自动化”技术装置。 [1]美国机器人协会(RIA)把机器人定义为“一种用于移动各种材料、零件、工具或装置的,通过可编程序动作来执行种种任务的,并具有编程能力的多功能机械手”。显然,这里指的是工业机器人。日本工业机器人协会(JIRA)定义工业机器人为“一种装备有记忆装置和末端执行器的,能够转动并通过自动完成各种移动来代替人类劳动的通用机器”。 [1]这里主要介绍日本工业机器人协会(JIRA)、美国机器人协会(RIA)和法国工业机器人协会(AFRI)所采用的分类法。

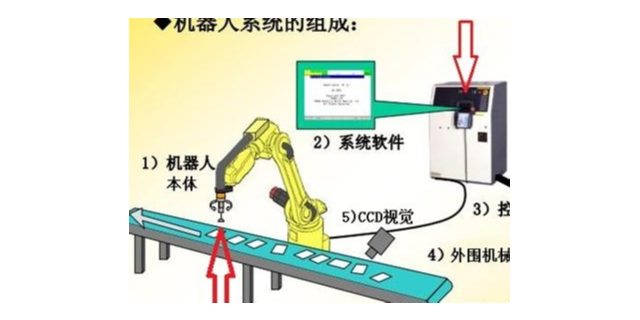
一、机器人系统的设计机器人系统的设计需要考虑以下几个方面:系统架构设计机器人系统的架构设计是整个系统的基础,它决定了系统的性能、可靠性和可扩展性。机器人系统的架构设计应该包括以下几个方面:(1)硬件架构设计:硬件架构设计是机器人系统的物理结构,包括机器人的机械结构、传感器、执行器、控制器等。硬件架构设计需要考虑机器人的功能需求、工作环境、成本等因素。2)软件架构设计:软件架构设计是机器人系统的软件结构,包括机器人的控制算法、人机交互界面、通信协议等。软件架构设计需要考虑机器人的任务需求、性能要求、可扩展性等因素。该部分主要由计算机硬件和控制软件组成。秦淮区如何机器人系统便捷
软件主要由人与机器人进行联系的人机交互系统和控制算法等组成。南京参考机器人系统介绍
Filesystem Level文件系统层概念就是你在碟片里面遇到的资源,例如:Packages:ROS的基本组织,可以包含任意格式文件。一个Package 可以包含ROS执行时处理的文件(nodes),一个ROS的依赖库,一个数据,配置文件或一些有用的文件在一起。Manifests:Manifests (提供关于Package元数据,包括它的许可信息和Package之间依赖关系,以及语言特性信息像编译旗帜(编译优化参数)。Stacks: Stacks 是Packages的,它提供一个完整的功能,像“navigation stack” Stack与版本号关联,同时也是如何发行ROS软件方式的关键。南京参考机器人系统介绍
南京晟睿达机械有限公司汇集了大量的优秀人才,集企业奇思,创经济奇迹,一群有梦想有朝气的团队不断在前进的道路上开创新天地,绘画新蓝图,在江苏省等地区的商务服务中始终保持良好的信誉,信奉着“争取每一个客户不容易,失去每一个用户很简单”的理念,市场是企业的方向,质量是企业的生命,在公司有效方针的领导下,全体上下,团结一致,共同进退,齐心协力把各方面工作做得更好,努力开创工作的新局面,公司的新高度,未来南京晟睿达机械供应和您一起奔向更美好的未来,即使现在有一点小小的成绩,也不足以骄傲,过去的种种都已成为昨日我们只有总结经验,才能继续上路,让我们一起点燃新的希望,放飞新的梦想!