商机详情 -
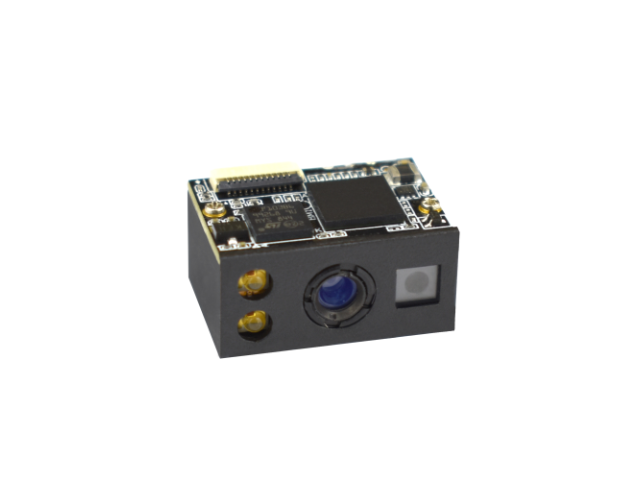
南昌智能门禁识读引擎扫描模组
迷你识别模块是一种基于深度学习的图像识别模型,它可以用于解决过拟合问题。过拟合是指模型在训练数据上表现很好,但在测试数据上表现不佳的现象。这是由于模型在训练过程中过于拟合训练数据,导致无法泛化到新的、未见过的数据。为了解决过拟合问题,迷你识别模块采用了一种集成学习的策略。它首先将输入图像分割成若干个小的区域,并使用多个不同的卷积神经网络对每个区域进行特征提取。然后,迷你识别模块将这些特征图拼接在一起,并使用全连接层对其进行分类。此外,迷你识别模块还使用了数据增强技术,通过对训练数据进行旋转、平移、缩放等操作,以增加模型的泛化能力。深圳远景达,为您的业务增值不可或缺的合作伙伴。南昌智能门禁识读引擎扫描模组

嵌入式扫描头的机械部件是否需要定期润滑取决于多种因素,包括设备的设计、使用环境、使用频率等。一般来说,大部分机械设备都需要定期润滑以保证其正常运行。润滑的目的是减少设备内部的摩擦和磨损,降低设备运行温度,防止设备部件锈蚀和腐蚀,同时也能密封设备内部,防止外部污染物进入。对于嵌入式扫描头来说,如果它的机械部件设计得宜,使用环境良好,使用频率适中,那么通常是不需要定期润滑的。然而,如果设备出现摩擦噪音、运动不顺畅、温度升高等情况,可能就需要进行润滑。此外,如果设备的使用环境恶劣,如高温、高湿、多尘等,那么也需要更频繁地进行润滑。上海一维扫码模块嵌入式扫描头可以提高数据采集的效率和准确性。
嵌入式扫描头性能下降的问题,如果是由于灰尘或其他脏物所导致,可以采取以下步骤进行处理:1.清理扫描头:首先,尝试清理嵌入式扫描头的灰尘和脏物。使用干燥、无尘的布料或者专业的镜头纸,轻轻擦拭扫描头表面。注意避免使用任何可能对扫描头光学部件造成划痕或损伤的物品。2.使用压缩空气:如果清理扫描头表面无法解决问题,可以尝试使用压缩空气来吹走可能积聚在扫描头内部的灰尘。但要注意压缩空气压力不能过高,以免对扫描头内部光学部件造成损害。3.使用清洁剂:如果灰尘或其他脏物已经深入到扫描头内部,可以尝试使用专业的镜头清洁剂。在非常谨慎的情况下,将清洁剂滴在棉签上,然后轻轻擦拭扫描头边缘。但要注意不要让清洁剂进入扫描头内部,以免对设备造成损害。4.寻求专业帮助:如果以上方法都无法解决问题,或者你不确定如何处理,尽量联系设备制造商或专业的技术支持寻求帮助。他们可能有更专业的方法来处理这个问题。
条码扫描模组的解码功能主要通过以下步骤实现:首先,扫描器需要识别条形码所在的区域。在启动扫描后,扫描器会搜索所有的条形码以检测其类型。一旦识别出条形码,条形码API就有需要检测的区域,然后开始解码。在解码的过程中,条形码扫描器通过特定的算法对图像像素进行计数和比较,以匹配开始和结束标识符。接着,它根据该代码类型的规范来解析开始标识符和结束标识符之间的模式,以解开编码的数据。对于一维(1D)条形码,这个过程是一样。但是,与二维(2D)条形码不同的是,二维条形码通常还包含冗余数据。在解码二维条形码时,条形码识别API会尝试根据该代码类型的规范来解析黑白模块的模式。这些规范都是标准化的。除了条形码信息(通常是数字和字符的组合)之外,二维条形码通常还包含冗余数据,这些数据可以用于校验和纠错,以提高解码的准确性。嵌入式扫描头可以安装在各种不同的设备中,从而使其具有高度的灵活性。

调整嵌入式扫描头的灵敏度以适应不同的环境条件是一个复杂的过程,需要具备一定的技术知识和实践经验。以下是一些常见的方法和步骤,供您参考:1. 了解您的扫描头:首先,您需要了解您的嵌入式扫描头的具体参数和特性,例如其工作频率、灵敏度、扫描角度、视场等。这些信息将有助于您确定如何调整灵敏度以适应特定的环境条件。2. 选择合适的传感器:对于特定的环境条件,例如高湿度、高温或强光,您可能需要选择具有相应防护功能的传感器,如防水、防尘或抗强光的传感器。3. 调整扫描头的位置和角度:在某些情况下,改变扫描头的位置或角度可能会影响其灵敏度。例如,如果扫描头被设计为捕捉特定方向的目标,那么改变它的方向可能会影响其性能。4. 调整扫描头的灵敏度设置:大多数嵌入式扫描头都会有灵敏度设置选项。灵敏度通常是指在特定条件下触发扫描头的较小距离或幅度。通过调整这个设置,您可以改变扫描头的灵敏度,从而影响其在不同环境条件下的性能。5. 使用校准设备进行校准:对于一些高精度的应用,您可能需要使用专门的校准设备来校准您的扫描头,以确保其在各种环境条件下都能保持精确的灵敏度。远景达扫描模块,为您提供好的扫描能力。南昌智能门禁识读引擎扫描模组
条码扫描模组可以快速识别商品信息,提高企业的市场竞争力。南昌智能门禁识读引擎扫描模组
红光扫码模块的工作原理主要是通过相机捕捉红光图像传感器上的条码图像来进行识别。红光是指可见光谱中的红色光波,波长范围为625-740纳米。在红光扫码模块中,相机镜头将捕捉到的红光条码图像传递给图像传感器进行处理。图像传感器将光信号转换为电信号,然后通过对这些电信号进行解码和解析,将条码信息传输到计算机或其他设备中进行处理。在解码过程中,红光扫码模块会使用内置的算法和库来对条码进行识别和解码,以便准确地获取条码中的信息。与激光扫描模块相比,红光扫码模块具有更高的稳定性和更低的返修率。因为红光扫描模块没有机械结构,所以它不会因为机械故障而导致扫描失败。同时,红光扫码模块的扫描速度也较快,因为它可以直接捕捉条码图像,而不需要通过激光或摄像头进行扫描。此外,红光扫码模块也具有更高的兼容性和更普遍的应用领域,例如它可以用于医疗、工业和商业领域中的各种不同类型和规格的条码识别。南昌智能门禁识读引擎扫描模组