新闻中心 - 朋诚科技(江苏)有限公司
-
 福建人工智能机器人厂家电话
福建人工智能机器人厂家电话又称外部受控机器人。机器人的本体上没有智能单元只有执行机构和感应机构,它具有利用传感信息(包括视觉、听觉、触觉、接近觉、力觉和红外、超声及激光等)进行传感信息处理、实现控制与操作的能力。受控于外部计算...
发布时间:2024.05.05 -
 农村电子人工智能机器人进口
农村电子人工智能机器人进口机器人有多种导航方式,根据环境信息的完整程度、导航指示信号类型等因素的不同,可以分为基于地图的导航、基于创建地图的导航和无地图的导航3类。根据导航采用的硬件的不同,可将导航系统分为视觉导航和非视觉传感...
-
管理人工智能机器人定制价格
对运动要素来说,智能机器人需要有一个无轨道型的移动机构,以适应诸如平地、台阶、墙壁、楼梯、坡道等不同的地理环境。它们的功能可以借助轮子、履带、支脚、吸盘、气垫等移动机构来完成。在运动过程中要对移动机构...
-
 农村电子人工智能机器人要求
农村电子人工智能机器人要求1多层次传感器融合由于单个传感器具有不确定性、观测失误和不完整性的弱点,因此单层数据融合限制了系统的能力和鲁棒性。对于要求高鲁棒性和灵活性的先进系统,可以采用多层次传感器融合的方法。低层次融合方法可以...
-
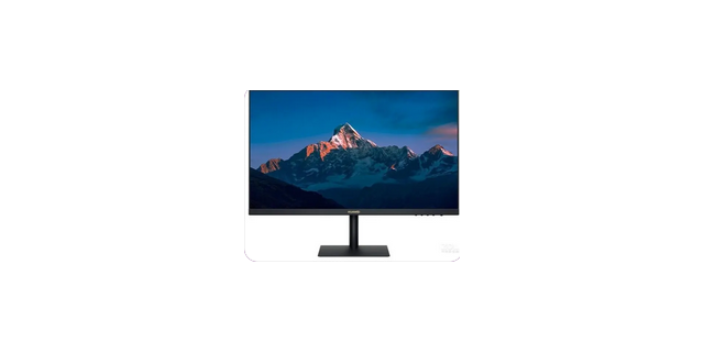
 内蒙古显示器交易价格
内蒙古显示器交易价格显示器(英语:displaydevice,别名:监视器)是将一定的电子文件通过特定的传输设备显示到屏幕上再反射到人眼的一种显示工具。根据制造材料的不同,可分为:阴极射线管显示器(CRT)[1],等离子...